View the series
View the series
Read the transcript
Only available for non-commercial distribution
For any commercial distribution contact the executive producer
© La Belle Société production / EPPDCSI-Universcience / MNHN / Ceebios / Ministère de la Transition écologique et solidaire / IRD / Institut des Futurs souhaitables / Région Sud / Région Nouvelle-Aquitaine / Région Bretagne / Communauté d'Agglomération Pays Basque / CNRS – 2020
Reference
7732
Bio-Robot
Series title
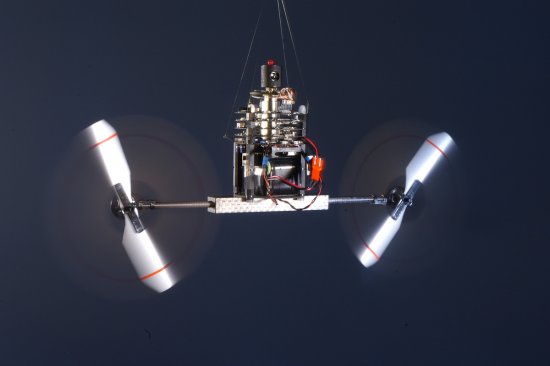
Nature = Future! Saison 2How can the performance of a hexapod robot be optimised by improving both its energy autonomy and its movements?
By copying the structure and arrangement of insect legs!
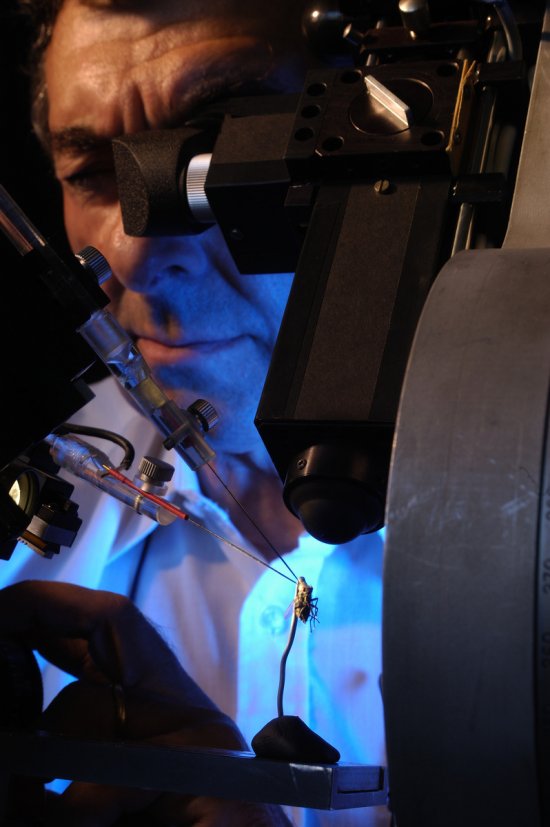
The ISM robotics laboratory in Marseille (CNRS, Aix-Marseille University) has developed biomimetic legs designed in 3D for their AntBot robot. A robot already inspired by the desert ant in order to find its way without GPS...
Duration
00:05:10
Production year
Définition
HD
Color
Color
Sound
Sound
Version(s)
French
Original material
MPEG4
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
Transcription
Lorsqu'on regarde un insecte se déplacer, on voit six pattes en action, mais on ne devine pas que cette locomotion repose sur des technologies très évoluées et très adaptées. L'étude de ces mécanismes biologiques et sensoriels par les chercheurs offre la perspective de réaliser des robots de plus en plus performants. " La particularité, c'est que les insectes ils ont un exosquelette, c'est-a-dire que c'est comme si leurs ossements étaient extérieurs. Contrairement à nous donc on a les muscles qui sont sur les os, chez les insectes, c'est le contraire, donc on a les os qui sont à l'extérieur avec une paroi rigide. Leur morphologie leur permet de faire supporter le poids de leur corps plus d'énormes charges qu'ils transportent, et ça c'est grâce à l'exosquelette et leurs agencements au niveau musculaire qui permettent d'avoir une grande résistance et de bien répartir les forces sur l'ensemble du corps. Ce qui est assez extraordinaire et nous, par exemple les êtres humains, on n'a pas cela. Les insectes, comme ils ont six pattes, leur style de déplacement consiste à garder toujours trois pattes au sol et trois pattes en l'air, ce qui permet de leur garantir une stabilité parfaite. Au niveau de la structure des pattes d'insectes, on retrouve généralement cinq segments. On a ce qu'on appelle le coxa, puis le trochanter, le fémur, le tibia et le tarse. On a des liaisons un peu souples entre les différents segments. Après, à l'intérieur donc on a des ligaments et des muscles qui tiennent tout cela ensemble. Cette morphologie, elle permet à l'insecte de ne pas avoir une grande consommation énergétique, de ne pas avoir à fournir trop d'efforts lorsque l'insecte réalise une tâche. Au niveau sensoriel, donc pour les insectes au niveau des pattes, on a trois grandes familles de mécanorécepteurs. La première qui permet de mesurer les mouvements ou les vitesses des différents membres. La deuxième famille permet de détecter les contacts avec des objets de l'extérieur et la troisième permet de mesurer les efforts. Et tous ces capteurs-là, en fait ils sont utilisés pour synchroniser la marche des insectes et ainsi interagir avec leur environnement. Donc adapter leur type de marche si le terrain est incliné. Donc tout cela est détecté par ces organes-là." L'équipe biorobotique de l'Institut des Sciences du Mouvement de Marseille développe une nouvelle génération de pattes de robots imprimées en 3D. Le but est d'améliorer les performances de leur robot hexapode, AntBot, dont l'autonomie de marche est limitée. Grâce à ces pattes bio-inspirées, ces petits robots vont pouvoir parcourir de plus longues distances sur des terrains plus complexes. "Donc la particularité, c'est qu'on a repris les dimensions de la fourmi Cataglyphis fortis pour avoir un modèle qui se rapproche de l'insecte réel. Au niveau de la structure de la patte, on a réussi donc par exemple les angles des jointures qui reprennent les angles qu'on observe chez les insectes parce qu'il faut donner un petit angle d'inclinaison à ces liaisons pour que les efforts pour supporter la charge du corps soient minimums. Puis on a reproduit les organes sensoriels présents chez les insectes qui permettent de mesurer les efforts extérieurs exercés sur la patte. Et, après aussi, on développe une autre patte de robot hexapode qui, cette fois-ci, est beaucoup plus petite. Et à cette échelle-là, en fait, on a essayé de se rapprocher encore plus des insectes, de faire encore plus du biomimétisme, en supprimant tout ce qui est mécanique classique, par exemple en enlevant les roulements à bille, tout ce qui est axes et en remplaçant par des liaisons souples. Cette nouvelle patte, elle possède une faible consommation énergétique, une grande résistance à la chaleur et, par conséquent, les pièces mécaniques ont moins de chance de casser, et en plus on intègre des capteurs de force qui n'étaient pas présents sur les robots précédemment développés dans notre laboratoire. Ce nouveau type de patte bio-inspirée va permettre par la suite d'avoir des robots hexapodes capables de s'adapter plus facilement aux terrains extérieurs. Donc des terrains accidentés où des robots classiques à roues ne pas peuvent pas accéder et où on vise à remplacer l'humain, si c'est trop dangereux pour l'humain, dans des missions de sauvetages, ce qui rend ce types de projets intéressants pour l'armée." En plus des applications civiles et militaires, ces pattes biomimétiques imprimées en 3D permettent de réaliser des robots à des coûts réduits. Elles servent aussi de modèles aux biologistes pour, en retour, mieux comprendre la morphologie unique des insectes.