© Thierry HOINVILLE/LIRIS/CNRS Images
Reference
20030001_1132
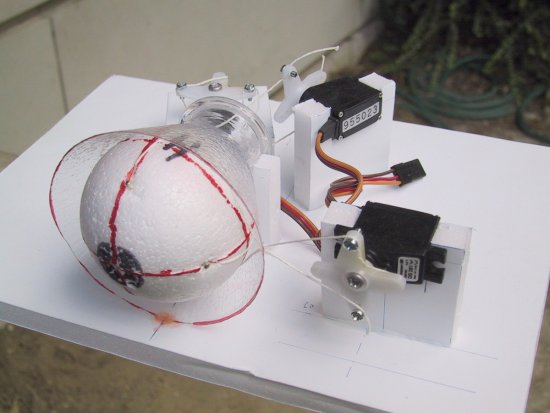
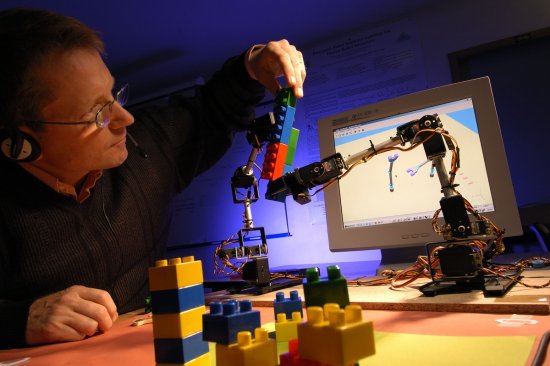
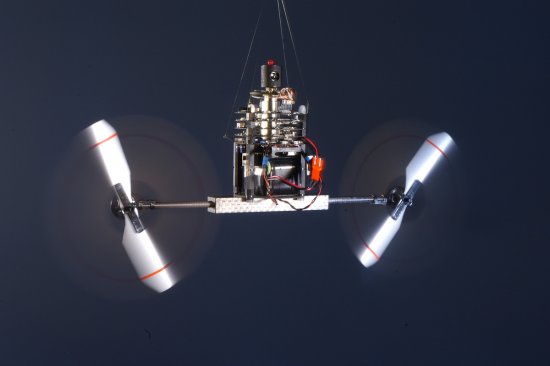
Simulation réaliste d'un hexapode en difficulté suite à la perte d'une patte. L'objectif de la reche
Simulation réaliste d'un hexapode en difficulté suite à la perte d'une patte. L'objectif de la recherche est de doter des robots autonomes de la capacité à faire face à une situation interne imprévue. Les robots les plus performants, qui ont le mieux répondu à la défaillance interne, sont croisés entre eux : on associe les meilleurs réseaux neuronaux avec les meilleurs mécanismes d'apprentissage ; on obtient ainsi des générations de robots autonomes qui progressivement s'adaptent, évoluent et corrigent de mieux en mieux leurs propres défaillances.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions