© Thierry HOINVILLE/LIRIS/CNRS Images
Référence
20030001_1132
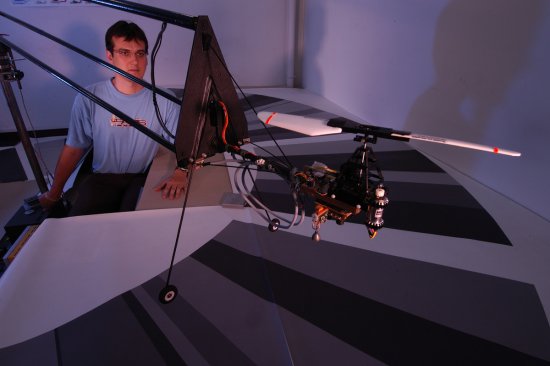
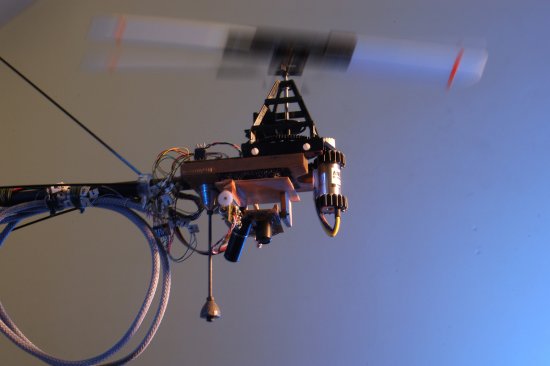
Simulation réaliste d'un hexapode en difficulté suite à la perte d'une patte. L'objectif de la reche
Simulation réaliste d'un hexapode en difficulté suite à la perte d'une patte. L'objectif de la recherche est de doter des robots autonomes de la capacité à faire face à une situation interne imprévue. Les robots les plus performants, qui ont le mieux répondu à la défaillance interne, sont croisés entre eux : on associe les meilleurs réseaux neuronaux avec les meilleurs mécanismes d'apprentissage ; on obtient ainsi des générations de robots autonomes qui progressivement s'adaptent, évoluent et corrigent de mieux en mieux leurs propres défaillances.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales