Institut des Systèmes Intelligents et de Robotique (ISIR)
PARIS CEDEX 05
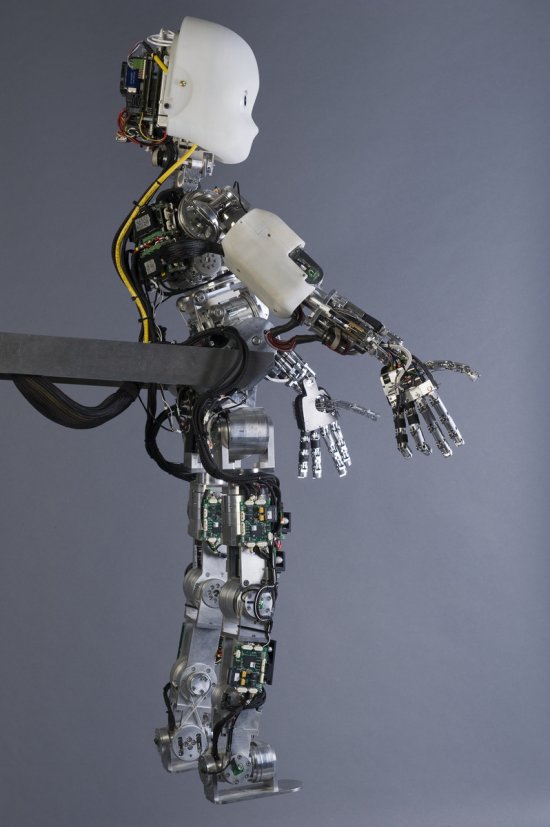
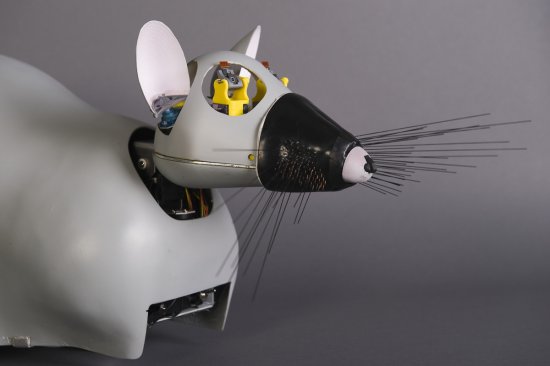
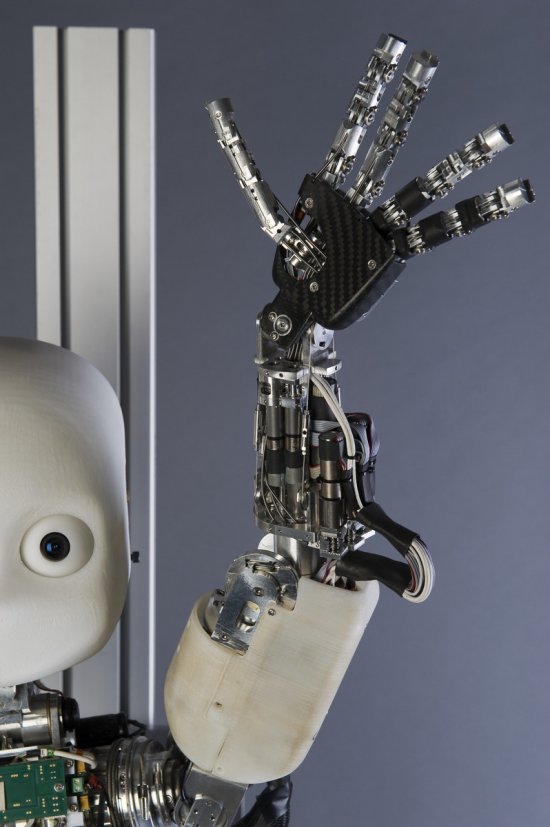
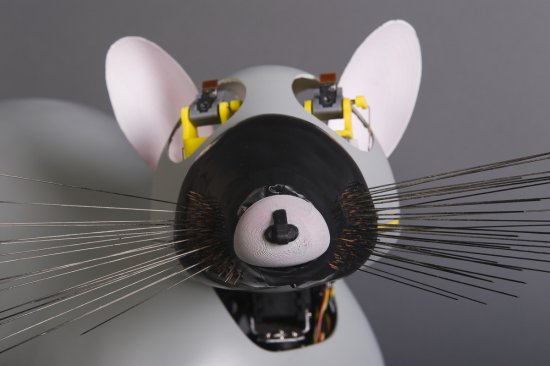
ISIR researchers help to anticipate the profound transformations in our societies brought about by the advent of artificial intelligences and robots. They work on the autonomy of machines and their ability to interact with human beings. Gathered in multidisciplinary teams, they create all kinds of intelligent and interactive systems, physical, virtual or mixed reality. Their applications address major societal challenges: health, industry of the future, transport, personal services.