© LAAS/CNRS Images
Référence
20110001_0452
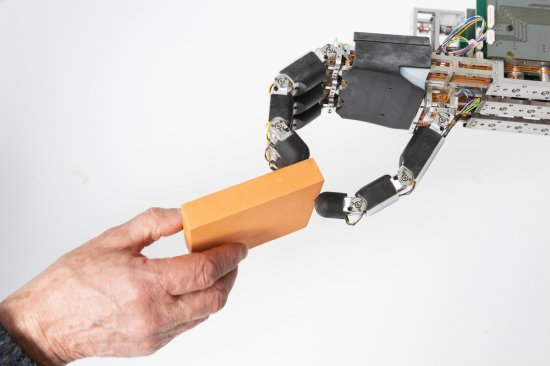
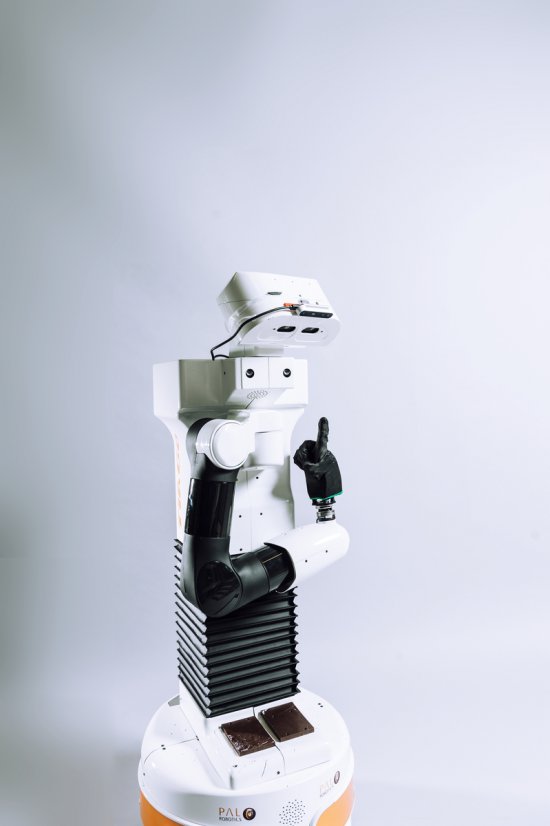
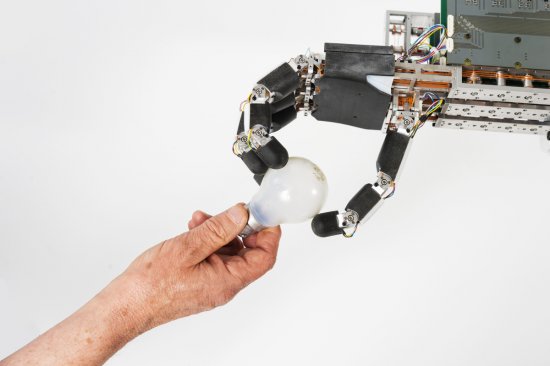
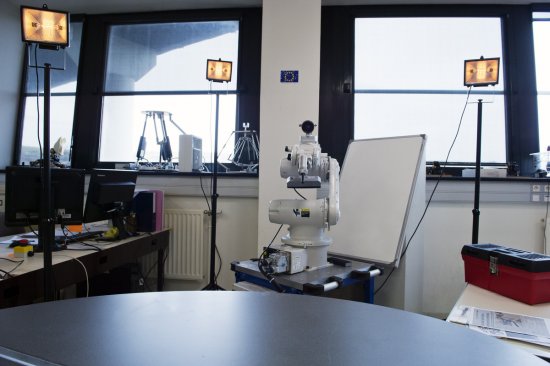
Robot HRP-2 utilisant des modèles de comportements humains pour planifier ses actions
Robot humanoïde HRP-2 utilisant des modèles de comportements humains pour planifier ses actions. Les chercheurs ont étudié le comportement humain dans des situations similaires pour analyser les lois que tout le monde suit dans un même contexte, c’est-à-dire les invariants d’une action. Des modèles ont ainsi pu être intégrés aux algorithmes de planification du mouvement pour calculer des postures beaucoup plus naturelles et acceptables.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales