Année de production
2009

© Benoît RAJAU/ISIR/CNRS Images
20090001_0877
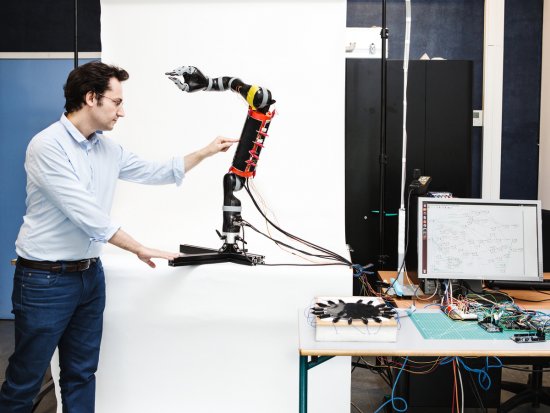
Le robot Hylos 2 est un véhicule autonome tout-terrain composé de 4 pattes-roues. Chaque patte a 2 liaisons pivots à axes parallèles actionnées par deux vérins électriques et supporte à son extrémité une roue directrice et motrice. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2009
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.