© Jean-Christophe BACCON/CNRS Images
Référence
20030001_0806
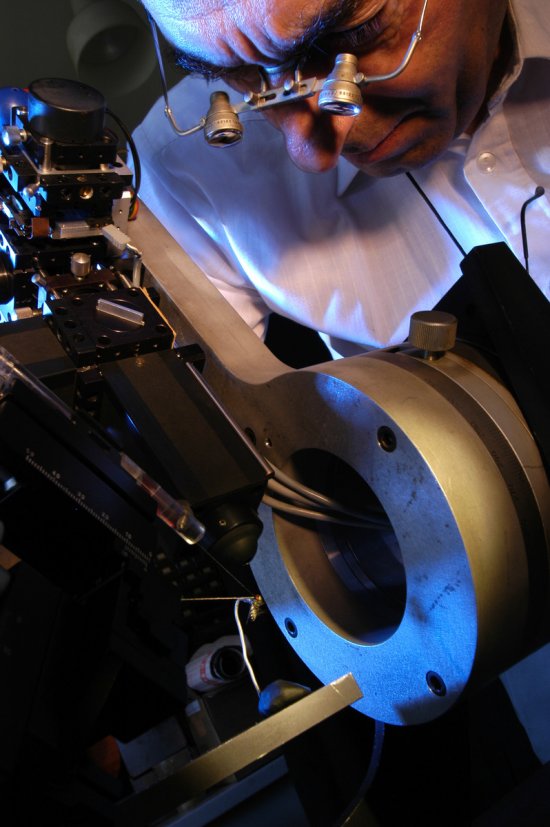
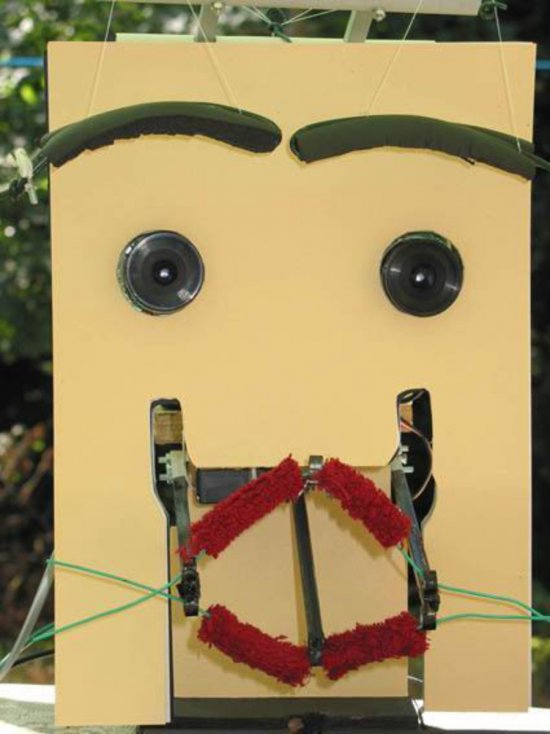
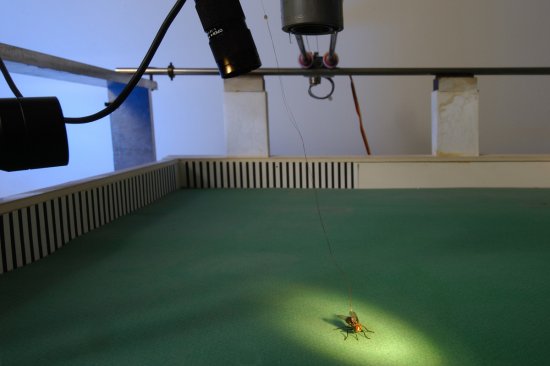
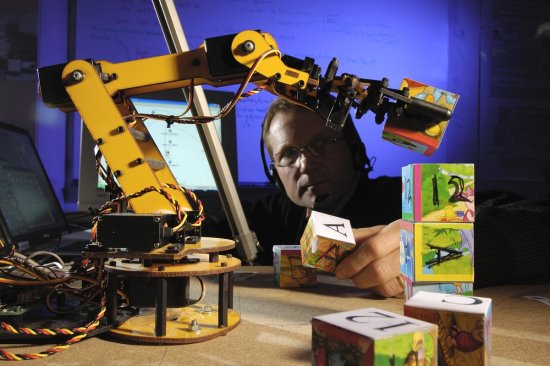
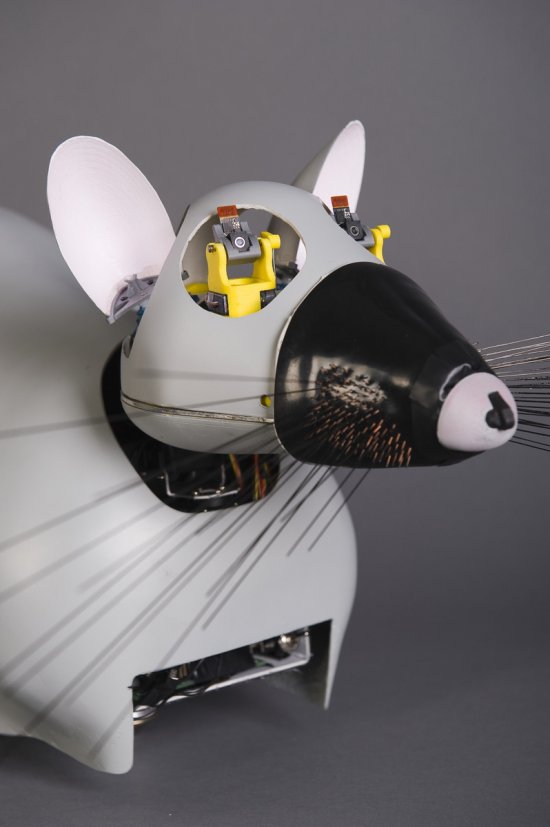
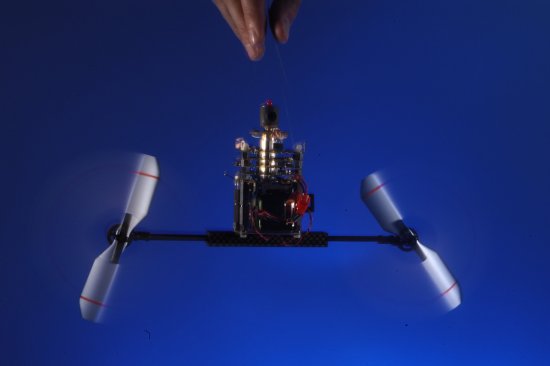
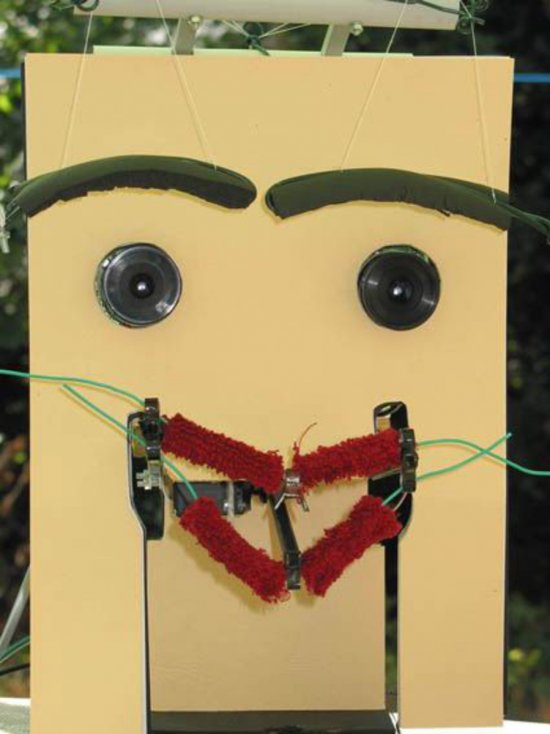
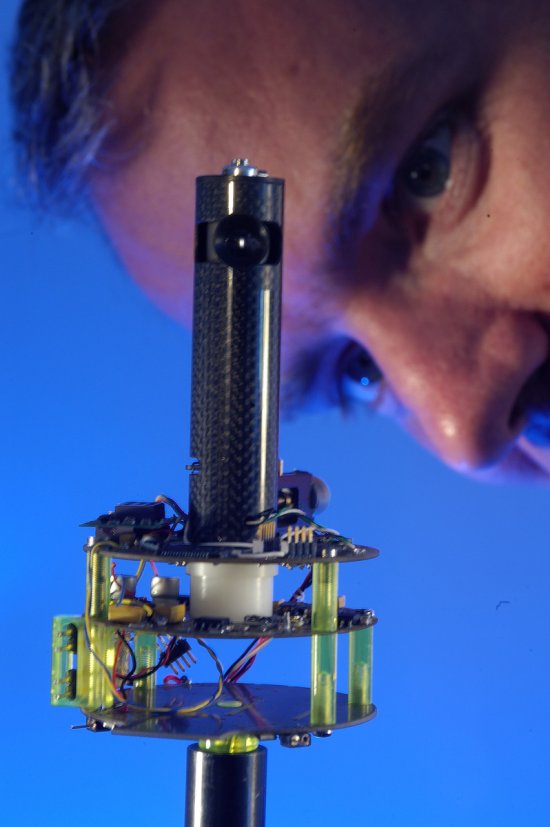
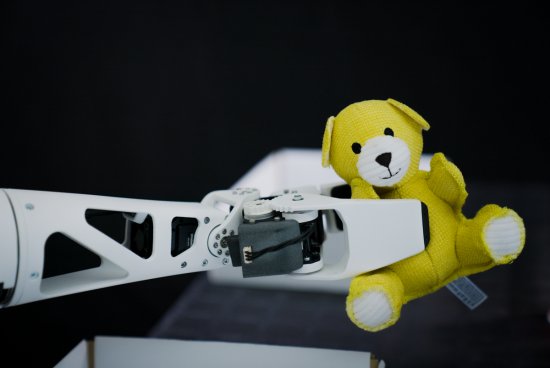
Robots utilisés pour des expériences de navigation autonome, de vision artificielle, d'imitation et
Robots utilisés pour des expériences de navigation autonome, de vision artificielle, d'imitation et de manipulation. De gauche à droite : robot koala sans option ; robot koala équipé d'un bras manipulateur à 5 degrés de liberté ; robot koala équipé d'une caméra pan, d'une boussole, d'un modem sans fil pour les communications et d'un émetteur pour la transmission de la vidéo et robot koala équipé d'une caméra pan-tilt et d'un bras manipulateur à 5 degré de liberté. Ce thème de recherche vise à simuler, mais surtout, à expérimenter des architectures neuronales permettant aux robots de naviguer de manière autonome dans un environnement a priori inconnu.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales