© Jean-Christophe BACCON/CNRS Images
Reference
20030001_0806
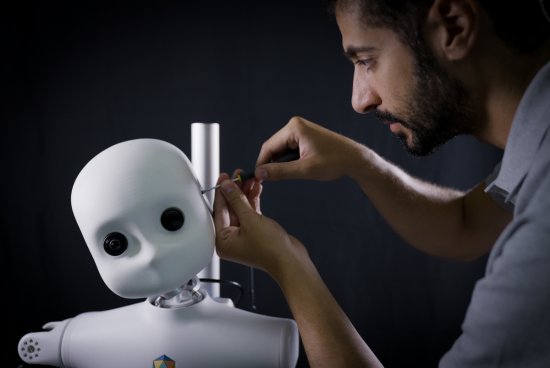
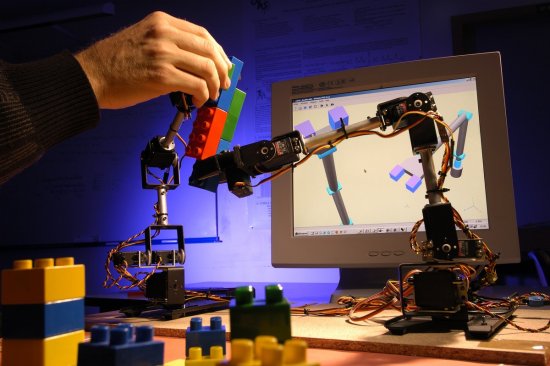
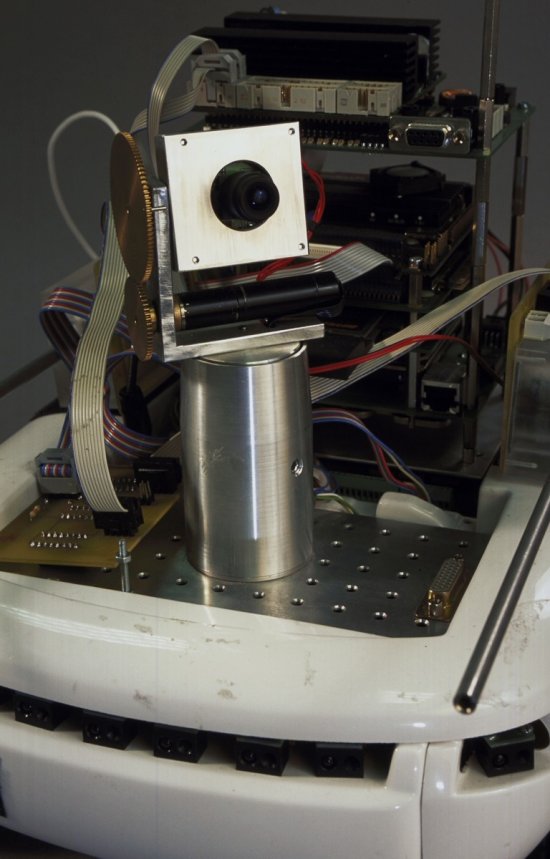
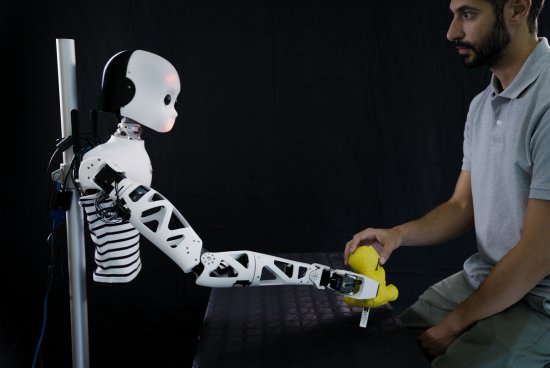
Robots utilisés pour des expériences de navigation autonome, de vision artificielle, d'imitation et
Robots utilisés pour des expériences de navigation autonome, de vision artificielle, d'imitation et de manipulation. De gauche à droite : robot koala sans option ; robot koala équipé d'un bras manipulateur à 5 degrés de liberté ; robot koala équipé d'une caméra pan, d'une boussole, d'un modem sans fil pour les communications et d'un émetteur pour la transmission de la vidéo et robot koala équipé d'une caméra pan-tilt et d'un bras manipulateur à 5 degré de liberté. Ce thème de recherche vise à simuler, mais surtout, à expérimenter des architectures neuronales permettant aux robots de naviguer de manière autonome dans un environnement a priori inconnu.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions