Année de production
2016

© Frédéric MALIGNE/MSH Toulouse/CNRS Images
20160058_0009
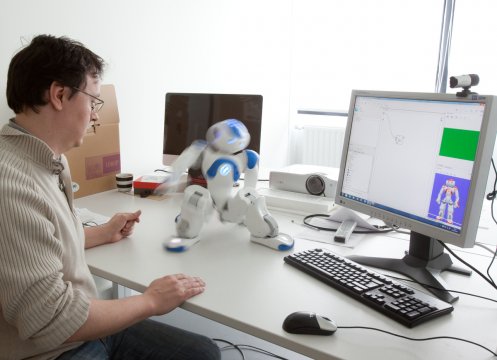
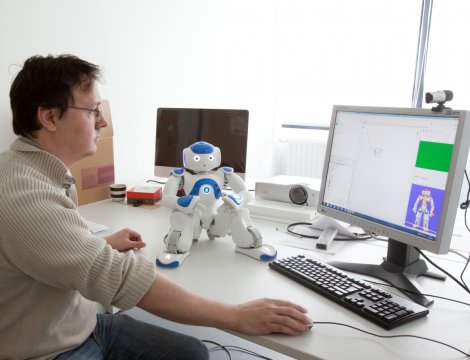
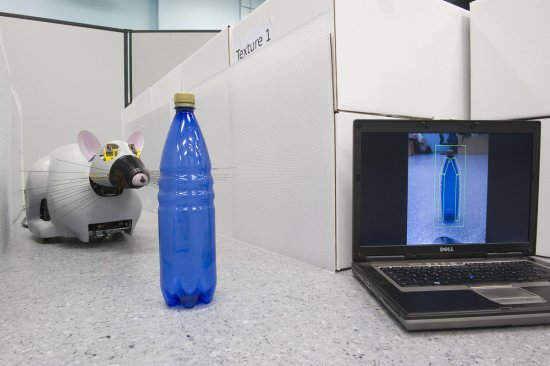
Interaction verbale entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. A l'écran est affichée l'interface de programmation permettant de commander le robot (en amont ou pendant l'expérimentation). En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte-outil), ou comme robot équipier ou encore robot-compagnon. Les compétences nécessaires à chaque niveau de collaboration sont différentes. La dimension sociale de l'interaction H-R est envisagée, dans plusieurs projets. Plateau ROB, de la plateforme technologique Cognition, comportements et usages (CCU).
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2016
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.