Objets posés sur le Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet posé sur la table joue un son. Les groupes d'objets sont représentés par une forme lumineuse qui les englobe lorsque ceux-ci sont très proches. Lors de la tâche de tri, les participants doivent effectuer des groupes de sons selon, par exemple, des critères de similarité. Une caméra est située sous la table…
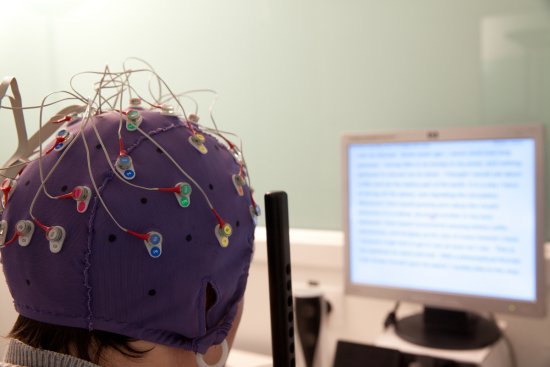
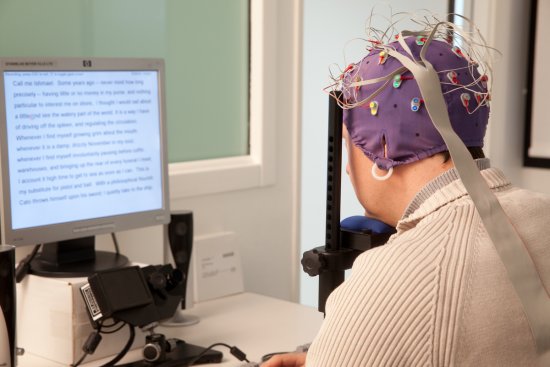
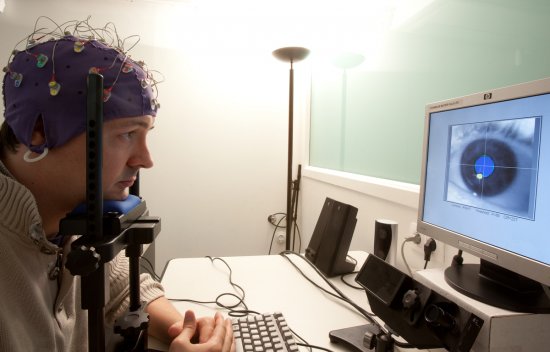
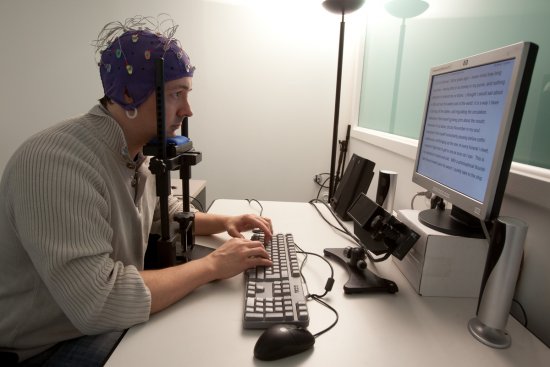
Casque d'électroencéphalographie utilisé dans le cadre d'une analyse de potentiels évoqués. Ce sont des signaux électriques produits par le système nerveux en réponse à un stimulus visuel présenté sur un écran, ici un texte. Cette analyse permet d'enregistrer le décours temporel précis de l'activité cérébrale (acquisition d'une meilleure connaissance des processus perceptifs et cognitifs). Le casque d'électroencéphalographie est couplé à un système d'enregistrement des données oculométriques…
Casque d'électroencéphalographie utilisé dans le cadre d'une analyse de potentiels évoqués. Ce sont des signaux électriques produits par le système nerveux en réponse à un stimulus visuel présenté sur un écran, ici un texte. Cette analyse permet d'enregistrer le décours temporel précis de l'activité cérébrale (acquisition d'une meilleure connaissance des processus perceptifs et cognitifs). Le casque d'électroencéphalographie est couplé à un système d'enregistrement des données oculométriques…
Régie du plateau d’enregistrement électroencéphalographique (EEG) de la plateforme technologique Cognition, comportements et usages (CCU). Cette installation a pour objectif la mesure et l’analyse de l’activité cérébrale d’un sujet lors de la réalisation d’une tâche.
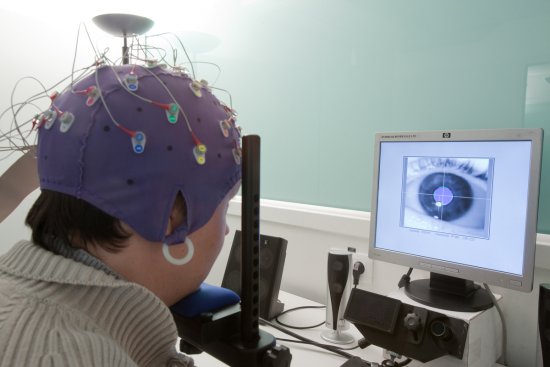
Analyse de potentiels évoqués, ce sont des signaux électriques produits par le système nerveux en réponse à un stimulus externe. Elle permet d'enregistrer le décours temporel précis de l'activité cérébrale (acquisition d'une meilleure connaissance des processus perceptifs et cognitifs). Un des équipements important est un casque d'électroencéphalographie compatible avec le système d'enregistrement des données oculométriques. Sur l'écran, visualisation de l'oeil du sujet pour régler le…
Analyse de potentiels évoqués, ce sont des signaux électriques produits par le système nerveux en réponse à un stimulus externe. Elle permet d'enregistrer le décours temporel précis de l'activité cérébrale (acquisition d'une meilleure connaissance des processus perceptifs et cognitifs). Un des équipements important est un casque d'électroencéphalographie compatible avec le système d'enregistrement des données oculométriques. Sur l'écran, visualisation de l'oeil du sujet pour régler le…
Utilisation d'un "eye-tracker" mobile sous forme de lunettes. Ici, le sujet lit la description d'un objet accroché au mur. Les mouvements oculaires sont suivis par le point vert sur l’écran de smartphone. Ces lunettes oculométriques portatives permettent d'enregistrer l'activité visuelle d'un individu, dans de nombreux environnements. La technique est basée sur une lumière infrarouge émise en direction de l'oeil. Les reflets pupillaires et cornéens engendrés et enregistrés par une caméra…
Utilisation d'un "eye-tracker" mobile sous forme de lunettes. Ici, le sujet consulte un plan d'évacuation accroché au mur. Les mouvements oculaires sont suivis par le point vert sur l’écran de smartphone. Ces lunettes oculométriques portatives permettent d'enregistrer l'activité visuelle d'un individu, dans de nombreux environnements. La technique est basée sur une lumière infrarouge émise en direction de l'oeil. Les reflets pupillaires et cornéens engendrés et enregistrés par une caméra…
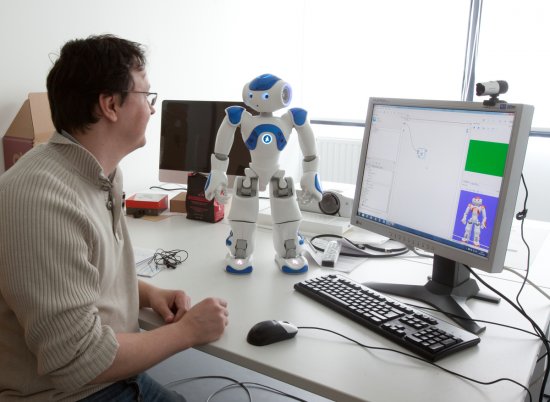
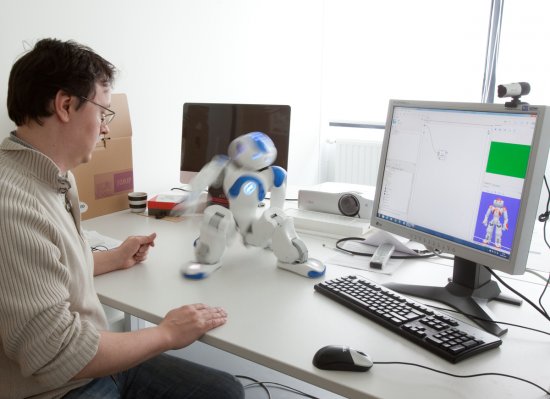
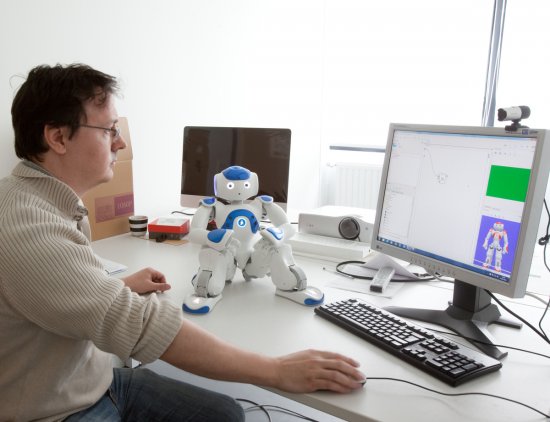
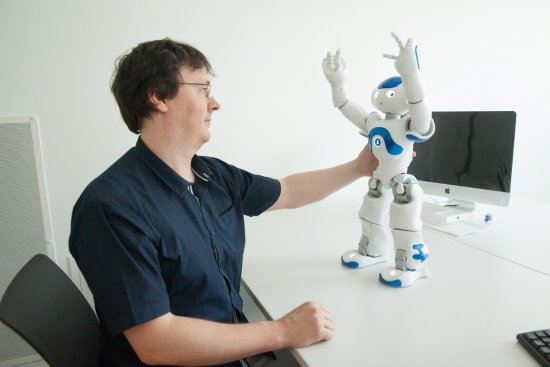
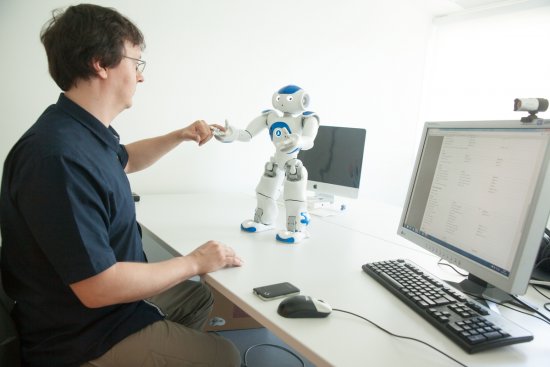
Interaction verbale entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. A l'écran est affichée l'interface de programmation permettant de commander le robot (en amont ou pendant l'expérimentation). En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. A l'écran est affichée l'interface de programmation permettant de commander le robot (en amont ou pendant l'expérimentation). En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) -…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. A l'écran est affichée l'interface de programmation permettant de commander le robot (en amont ou pendant l'expérimentation). En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) -…
Perceptrion, table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet posé sur la table joue un son et le participant doit créer des groupes de sons en déplaçant les objets. Une caméra est située sous la table rétroéclairée par un vidéo projecteur afin d'adapter l'affichage en fonction de la position des objets, ainsi que la diffusion du son en fonction des actions effectuées sur chaque objet. Cette interface…
Perceptrion, table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet posé sur la table joue un son et le participant doit créer des groupes de sons en déplaçant les objets. Une caméra est située sous la table rétroéclairée par un vidéo projecteur afin d'adapter l'affichage en fonction de la position des objets, ainsi que la diffusion du son en fonction des actions effectuées sur chaque objet. Cette interface…
Objet sous lequel est dessinée une forme, reconnue par la caméra infrarouge de l'interface du Perceptrion. Le Perceptrion, une table permettant une tâche de tri libre, est utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet posé sur la table joue un son et le participant doit créer des groupes de sons en déplaçant les objets. Une caméra est située sous la table rétroéclairée par un vidéoprojecteur afin d'adapter l'affichage en fonction de la…
Objets posés sur le Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet posé sur la table joue un son. Les groupes d'objets sont représentés par une forme lumineuse qui les englobe lorsque ceux-ci sont très proches. Un trait en pointillés entre deux objets ou deux groupes d'objets indique une proximité moins forte. Lors de la tâche de tri, les participants doivent effectuer des groupes de…
Configuration d'objets posés sur le Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet peut être configuré avant l'expérience de tri. L'interface permet de choisir le son associé à chacun des objets ainsi que son volume sonore. Deux options supplémentaires sont possibles : jouer le son en boucle avec un réglage du temps entre chaque répétition et la spatialisation binaurale (faisant…
Configuration d'objets posés sur le Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet peut être configuré avant l'expérience de tri. L'interface permet de choisir le son associé à chacun des objets ainsi que son volume sonore. Deux options supplémentaires sont possibles : jouer le son en boucle avec un réglage du temps entre chaque répétition et la spatialisation binaurale (faisant…
Configuration d'objets posés sur le Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet peut être configuré avant l'expérience de tri. L'interface permet de choisir le son associé à chacun des objets ainsi que son volume sonore. Deux options supplémentaires sont possibles : jouer le son en boucle avec un réglage du temps entre chaque répétition et la spatialisation binaurale (faisant…
Tâche de spatialisation du son du Perceptrion, une table permettant une tâche de tri libre, utilisée pour étudier la perception des sons (parole, musique, sons de l'environnement). Chaque objet joue un son et sa position sur la table permet de contrôler la position du son dans l'espace (au casque ou en "Ambisonic" sur plusieurs haut-parleurs). L'interface permet alors de composer une scène sonore spatialisée à partir de sons isolés définis au préalable. Lors de la tâche de tri, les participants…
Plateau d'études techniques et de recherches en audition (PETRA) : ce plateau est composé d'une cabine d'écoute de 26 m2 et d'une régie de 13 m2. L'ensemble des outils et compétences de PETRA permet de mettre en place des études sur la perception de tous types de son (parole, musique, sons de l'environnement) avec un contrôle optimal des conditions d'enregistrement et d'écoute. Plateau PETRA, de la plateforme technologique Cognition, comportements et usages (CCU).
Microphone de haute précision utilisé pour de la prise de son et de l’analyse acoustique. Plateau d'études techniques et de recherches en audition (PETRA), de la plateforme technologique Cognition, comportements et usages (CCU).
Microphone Ambisonic utilisé pour de la prise de son spatialisée en 3D. Ce type de prise de son est utilisée pour l'enregistrement d'ambiances sonores (ville, espaces publics, montagne, etc.) ou de salles de concert. Ce microphone permet une restitution sonore de l'ambiance en 3 dimensions sur n'importe quel type de dispositif multicanal. Plateau d'études techniques et de recherches en audition (PETRA), de la plateforme technologique Cognition, comportements et usages (CCU).
Sujet placé dans un studio d'enregistrement mobile, le plateau d’imagerie numérique ImNum. Ce studio est constitué notamment d’un appareil photo, d’une caméra 4K, d’une caméra thermique et d’une cabine mobile. Son objectif est la réalisation d'une base de données d’images et de vidéos, utilisables par les autres plateaux de la plateforme Cognition, comportements et usages ou pour d’autres thématiques de recherche. La cabine et le système d’éclairage permettent de placer le sujet dans un…
Analyse de potentiels évoqués, ce sont des signaux électriques produits par le système nerveux en réponse à un stimulus visuel présenté sur un écran, ici un texte. Cette analyse permet d'enregistrer le décours temporel précis de l'activité cérébrale (acquisition d'une meilleure connaissance des processus perceptifs et cognitifs). Un des équipements important est un casque d'électroencéphalographie couplé à un système d'enregistrement des données oculométriques. Cette combinaison des mesures…
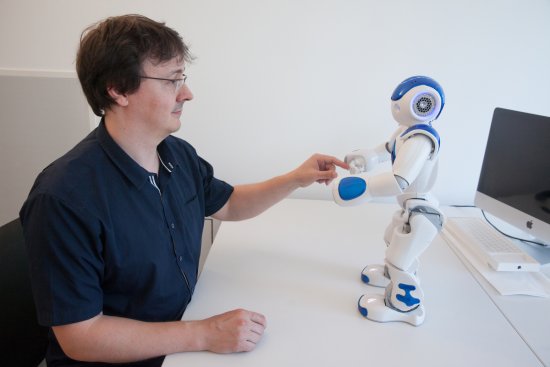
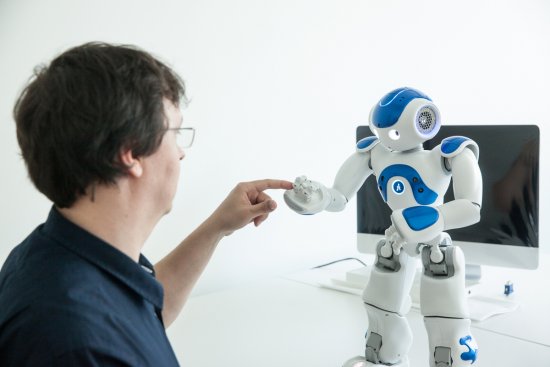
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
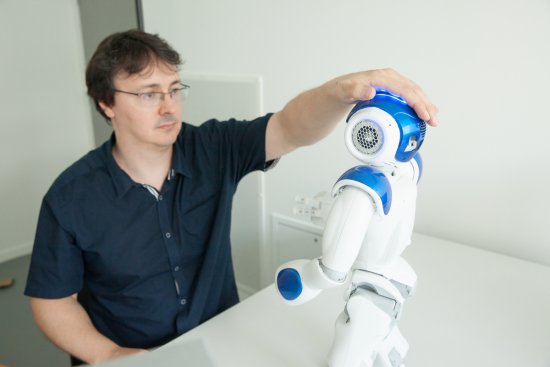
Robot humanoïde NAO qui possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte-outil), ou comme robot équipier ou encore…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Simulateur de conduite automobile SIMULAUTO, destiné aux études portant sur l’attention du conducteur au volant. Il est composé d'un véhicule équipé de capteurs et d'un ordinateur pourvu d'un logiciel de simulation et d’enregistrement de données. Deux écrans géants, placés respectivement à l’avant (écran triptyque, assurant une vision à 180° de face) et à l’arrière (écran plat), assurent un confort et une étendue du champ visuel suffisants à une immersion du conducteur dans l’environnement…
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.