© Patrick ROUGEOT/CNRS Images
Référence
20030001_0815
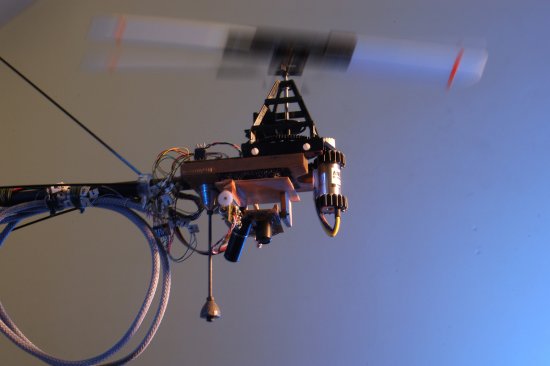
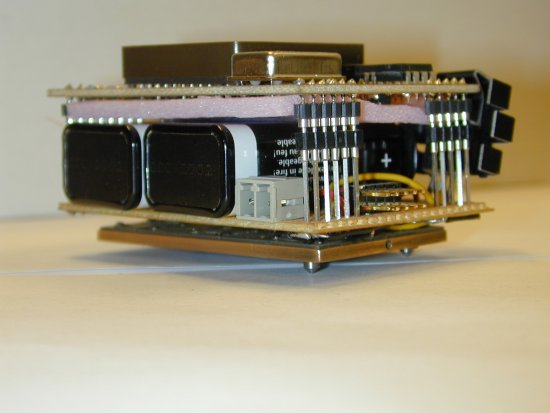
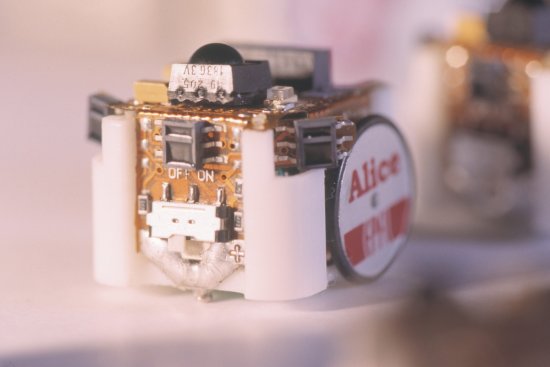
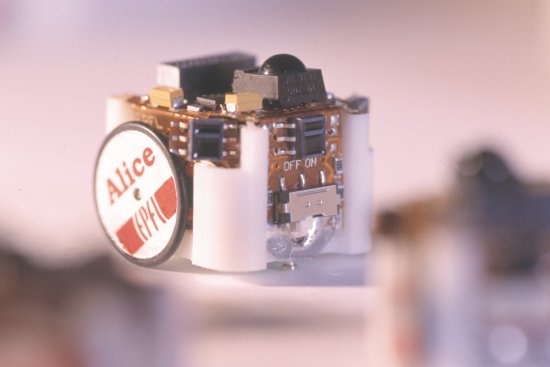
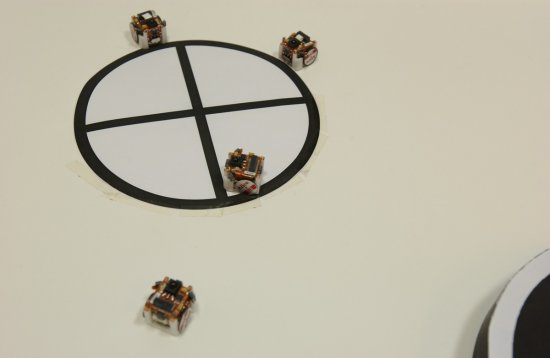
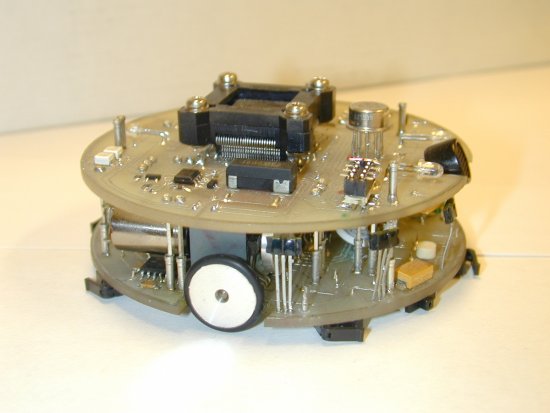
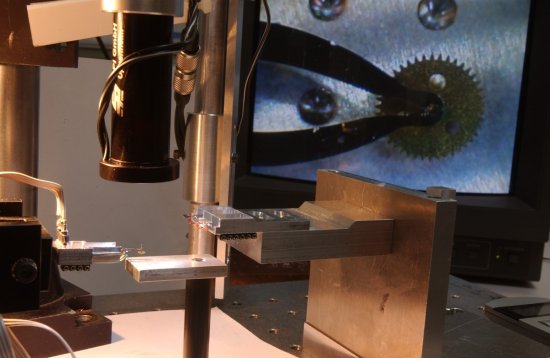
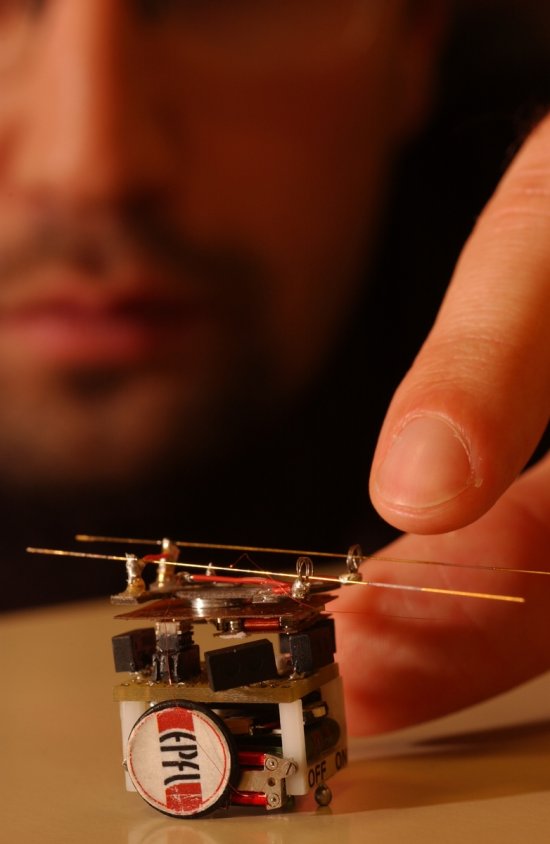
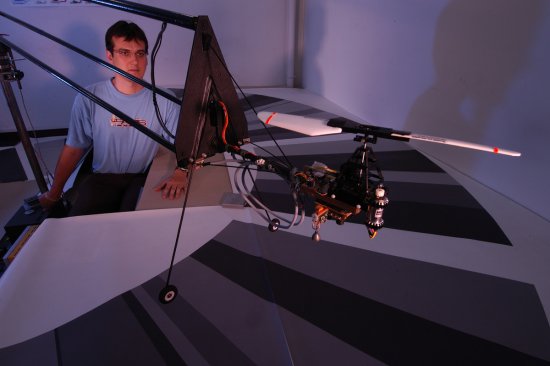
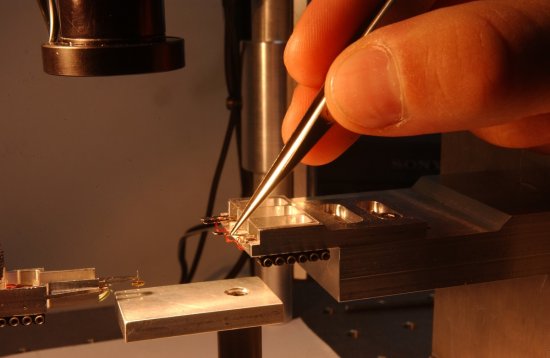
Minirobot autonome à roues, MESSOR. Ce système robotique est conçu autour d'un groupe de minirobots
Minirobot autonome à roues, MESSOR. Ce système robotique est conçu autour d'un groupe de minirobots autonomes, simples et robustes, dotés de moyens sensoriels élémentaires leur permettant de réagir à leur environnement et de communiquer avec leurs congénères. Développé en s'inspirant des études effectuées sur les colonies d'insectes, il se présente sous la forme de 3 étages de 80 mm de diamètre, sur lesquels sont regroupées les fonctions de commande, locomotion, perception, communication et l'énergie. La perception de l'environnement est effectuée grâce à une ceinture de capteurs (ultrasons, infrarouges, contacts) intégrée. Les applications potentielles de cette solution (qui réduit les coûts de mise en œuvre et de maintenance) sont : l'exploration et la cartographie d'un environnement, la recherche d'objets et le transport collectif.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales