Research program(s)
Production year
2023

© Cyril FRESILLON / INCIA / CNRS Images
20230098_0023
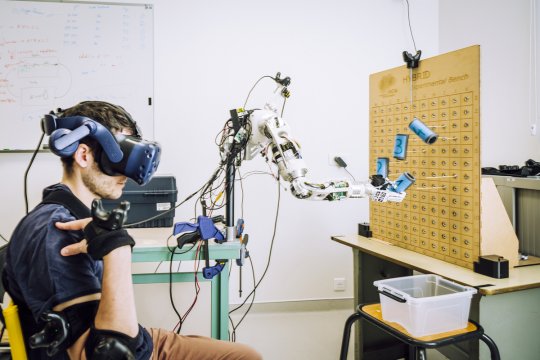
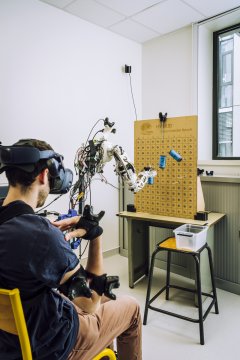
Manipulation d’objets à l’aide du bras robotique Reachy par une personne non amputée simulant un handicap, dans le cadre d’une recherche visant à améliorer le contrôle des prothèses de bras. L’opérateur pilote le robot grâce à la réalité virtuelle, qui lui permet de voir à travers les yeux de Reachy et de contrôler son point de vue en bougeant sa propre tête, et d’une intelligence artificielle. Cette dernière contrôle les articulations du bras robotique sur la base des mouvements de l’épaule et du torse de l’opérateur ainsi que du contexte (position et orientation de l’objet à saisir). Elle permet de reconstruire le mouvement naturel des articulations manquantes chez une personne amputée au-dessus du coude et pourrait, à terme, être utilisée sur les prothèses de bras. Ce type de contrôle des articulations de la prothèse, basé sur les mouvements résiduels, serait plus naturel et intuitif que celui des prothèses myoélectriques (contrôlées via les contractions des muscles restants) utilisées actuellement.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2023
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.