Research program(s)
Production year
2022

© Cyril FRESILLON / MIO / CNRS Images
20220020_0061
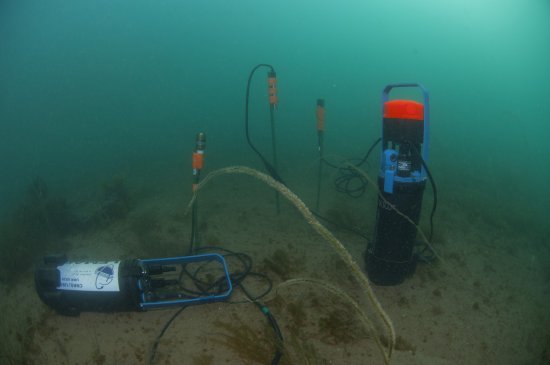
Mise à l’eau de BathyBot depuis le navire océanographique Pourquoi pas ? Il est intégré dans le BathyDock, une structure qui, une fois installée sur le fond marin, le reliera à la boîte de jonction scientifique (une prise connectée) pour l’alimenter et le connecter à Internet. Le rover sous-marin benthique BathyBot est un robot d’exploration téléopéré via Internet, dédié au suivi sur le long terme de l’environnement, l’écologie et des potentiels impacts du changement climatique dans les grands fonds. Il est installé en permanence sur le site de l’observatoire sous-marin EMSO-LO, à 2 500 m de profondeur au large de Toulon, où il récolte des données environnementales (température, salinité, pression et courant) et biologiques. Sa caméra hypersensible lui permet notamment d’observer la bioluminescence émise par les organismes marins. Ces données viendront compléter les études ponctuelles réalisées lors de campagnes océanographiques, pour prendre en compte les variations saisonnières et éventuellement observer des phénomènes imprévisibles. L’objectif est de mieux comprendre les dynamiques biogéochimiques (la transformation de la matière organique sous l’effet de processus biologiques, géologiques et chimiques) en milieu profond. BathyBot est développé par le MIO et la Division technique de l'INSU du CNRS.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2022
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.