Production year
2012

© Cyril FRESILLON / LORIA / CNRS Images
20120001_0817
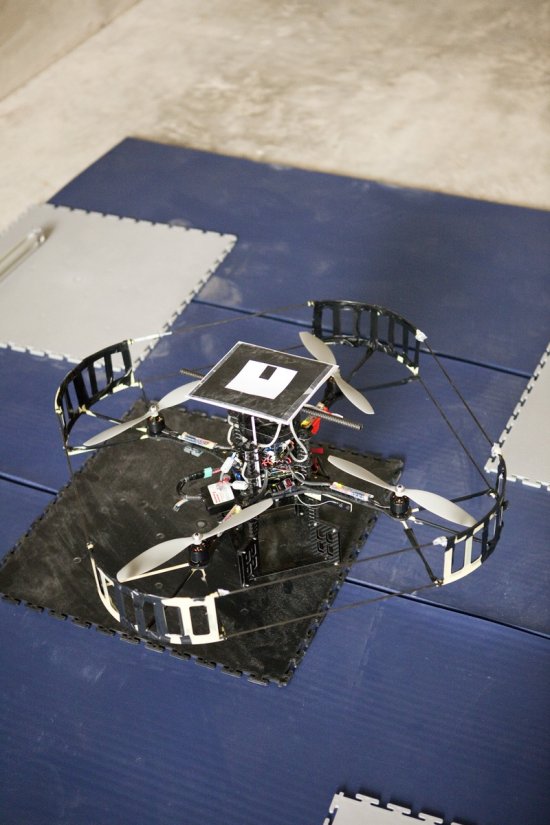
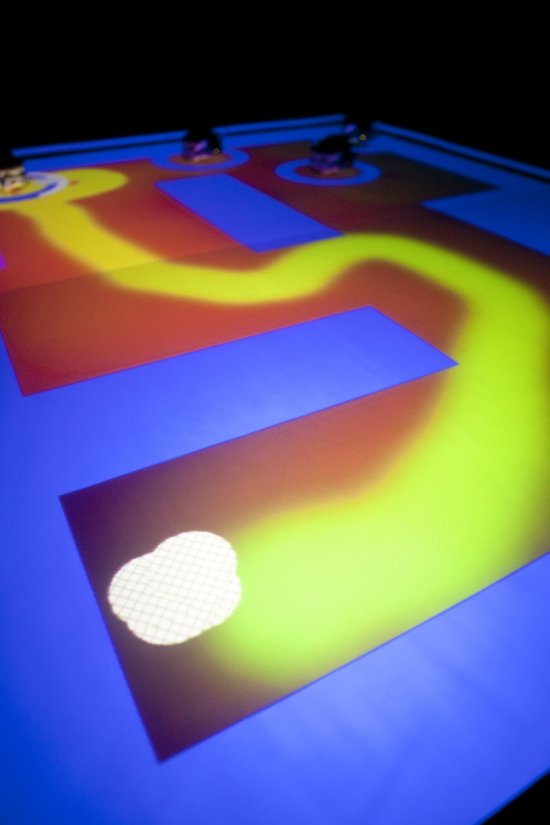
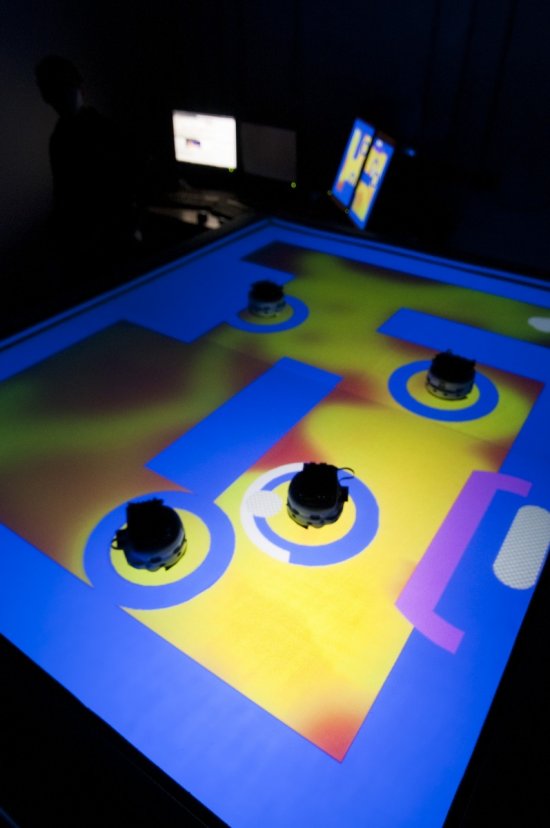
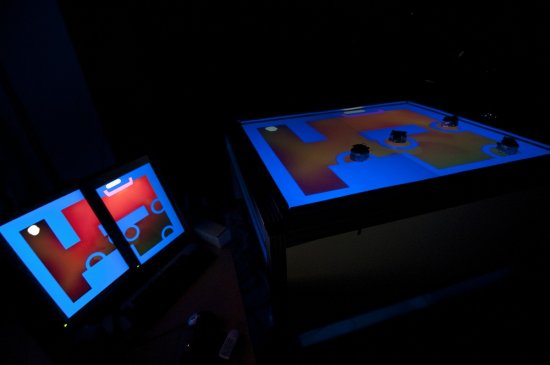
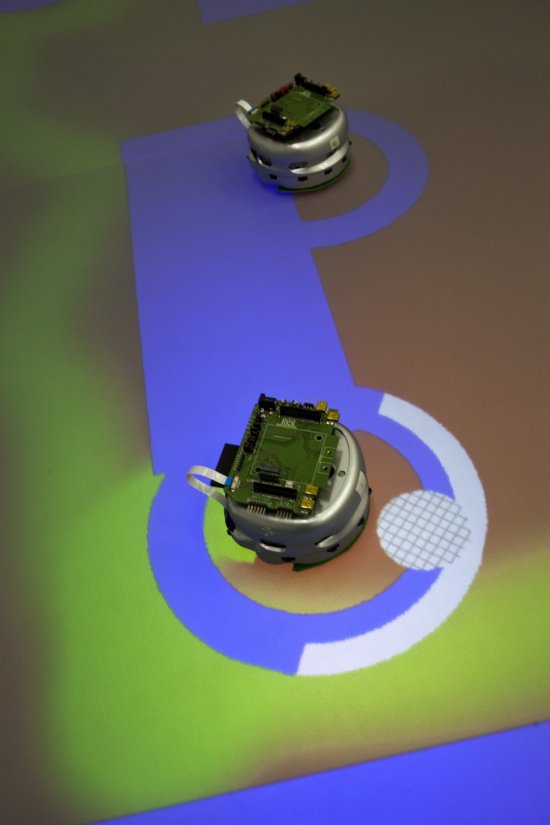
"Table interactive pour robots" formant une arène dans laquelle évoluent des robots mobiles autonomes. Ici, la table illustre un algorithme de recherche et de transport de ressources dans un environnement inconnu, inspiré du "fourragement" des fourmis, reposant sur le dépôt de phéromones entre ressources et nid. On peut voir le nid vide, visible à droite en violet/mauve. Un système de vidéo-projection permet d'afficher à la surface de la table toute représentation graphique d'un environnement dynamique. La table peut localiser les robots, détecter un objet, la pression d'un doigt, etc. Les robots sont capables de percevoir l'image projetée, d'en déduire un comportement de navigation et aussi modifier l'environnement par inscription (dépôt d'une phéromone digitale). L'objectif de cette table est la compréhension des mécanismes fondamentaux de l'intelligence collective.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2012
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.