Production year
2002

© Richard LAMOUREUX/INRIA/CNRS Images
20020001_1354
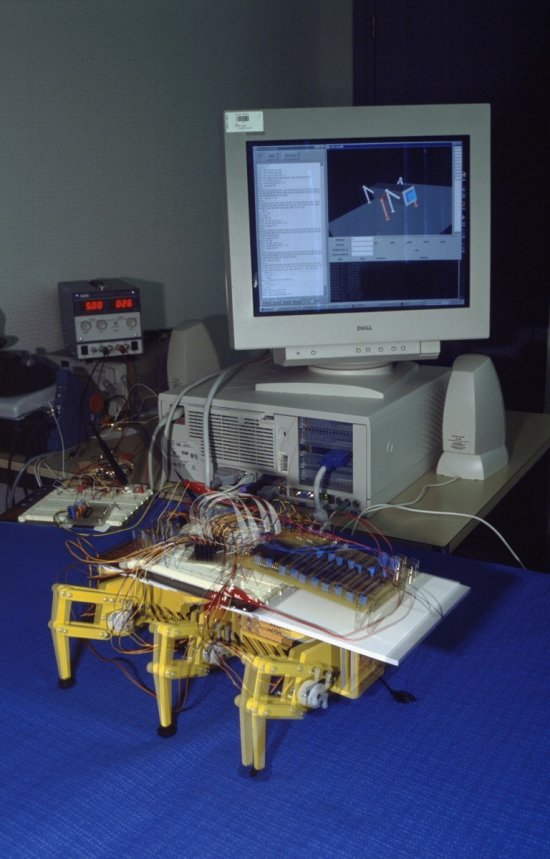
Robot hexapode expérimental. Plateforme mobile expérimentale, Atchoum se déplace grâce à 6 pattes dotées chacune de deux degrés de liberté. Chacune de ses pattes est commandée par deux servo-moteurs. La synchronisation de ces pattes est une tâche complexe et délicate. L'apprentissage par renforcement devrait permettre au robot d'apprendre à marcher par lui-même, en tirant parti de son expérience.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2002
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.