Research program(s)
Production year
2002

© Richard LAMOUREUX/INRIA/CNRS Images
20020001_1343
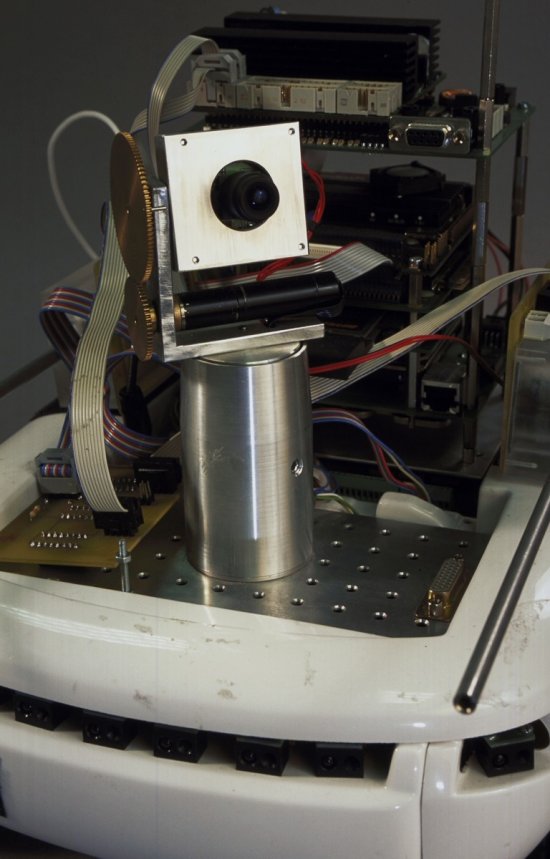
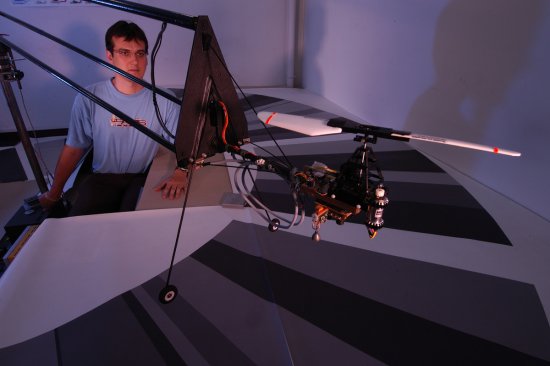
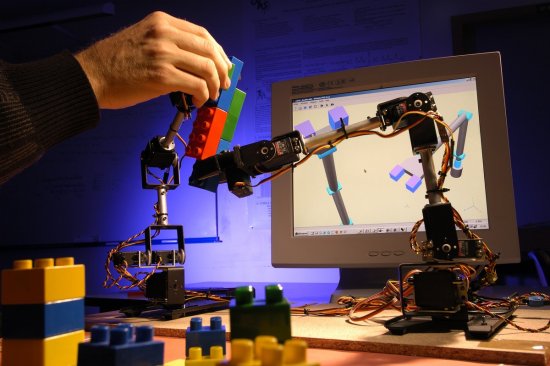
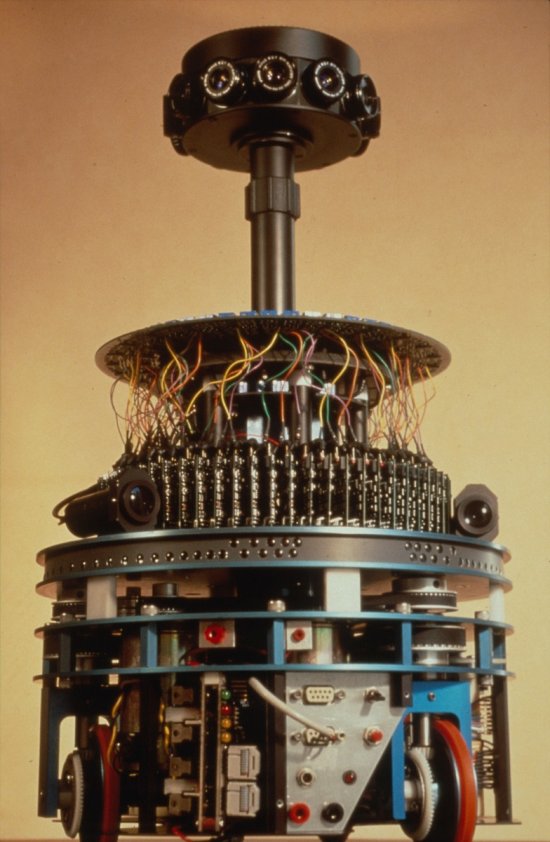
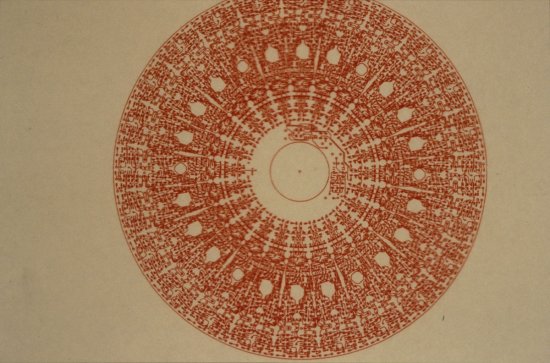
Plateforme expérimentale de perception olfactive, Koala. Il s'agit d'élaborer un robot qui détecte les odeurs pour identifier des produits à risques : fuite de gaz ou présence de produits dangereux dans des espaces publics ou dans des environnements hostiles (champ de mines, environnement radioactif). Grâce à ses deux capteurs qui le dotent d'une "stéréoolfaction" (les 2 tubes horizontaux) et à un modèle de réseaux de neurones impulsionnels d'inspiration biologique, le robot sait se diriger vers le lieu d'émission d'une odeur. D'autres structures neuronales lui permettant d'identifier les odeurs sont en développement. La photo montre une expérience menée par l'équipe où le robot dévie effectivement sa trajectoire pour se diriger vers une source olfactive placée devant un ventilateur (fumée). INRIA. Collaboration avec l'Université Henri Poincaré, Nancy 1 et l'Institut des Sciences Cognitives de Lyon.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2002
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.