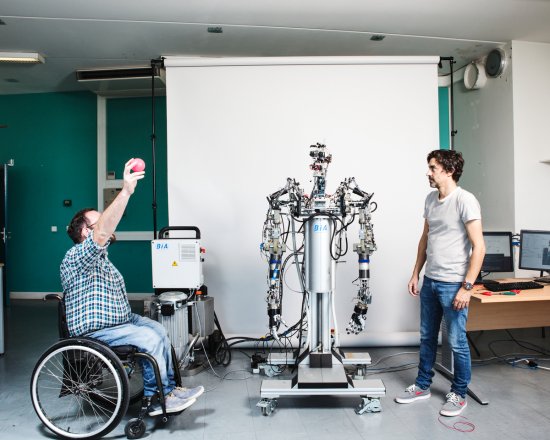
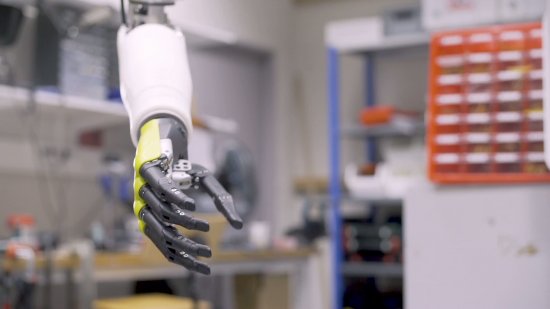
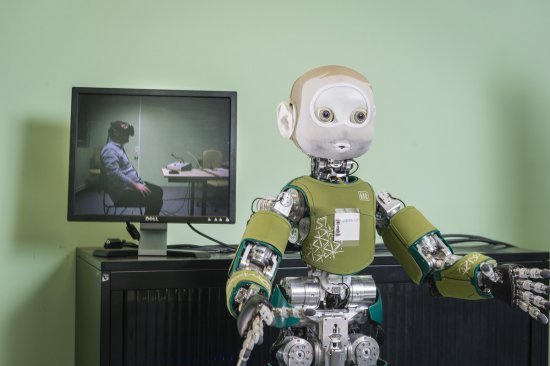
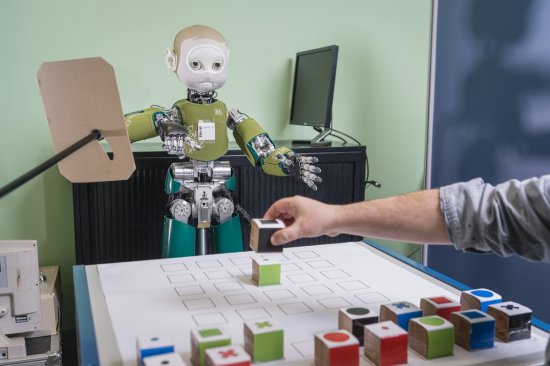
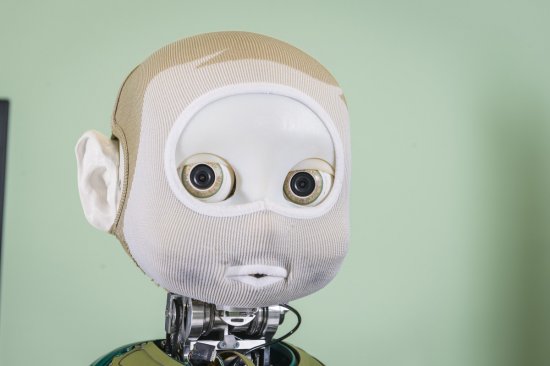
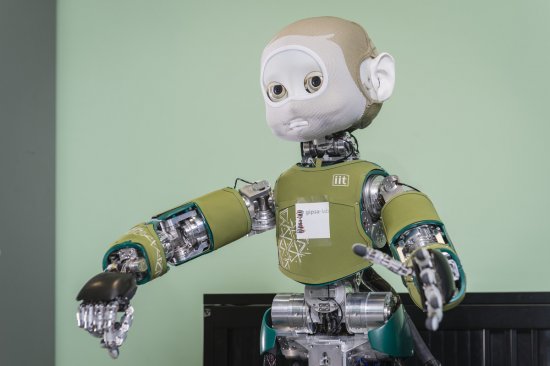
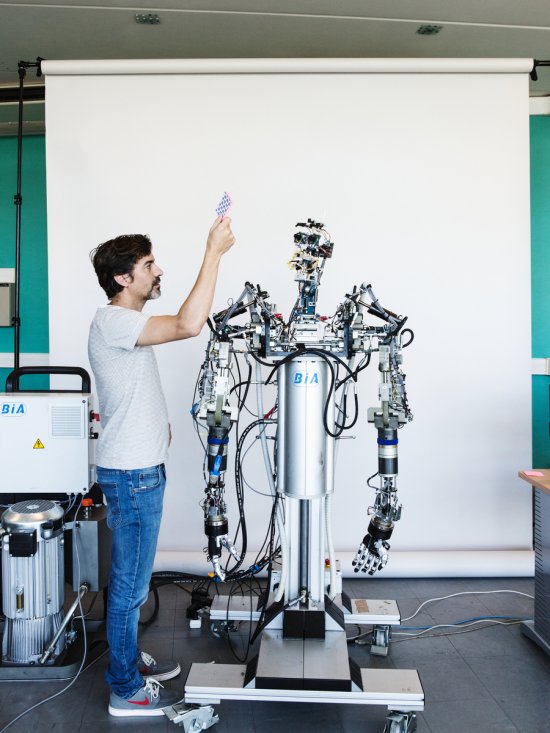
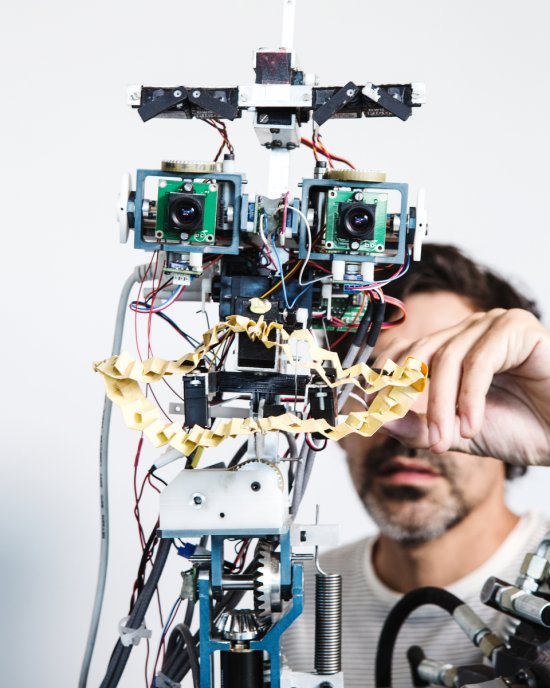
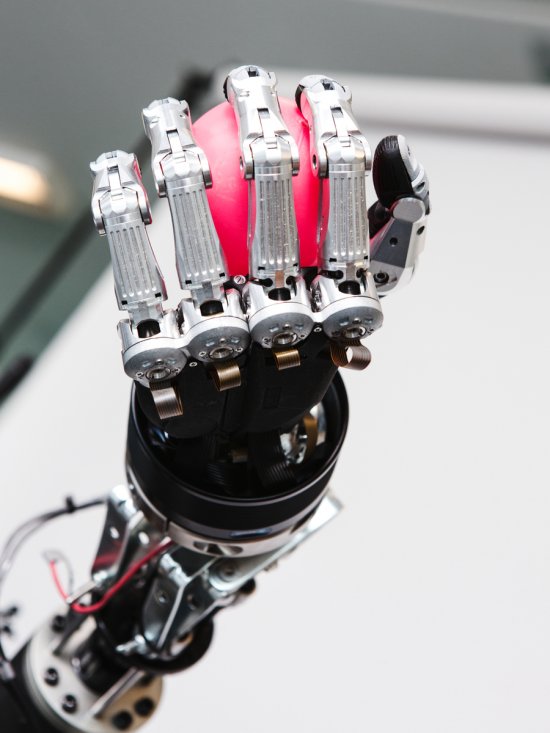
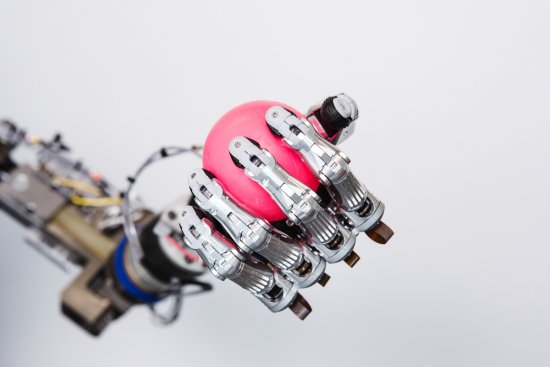
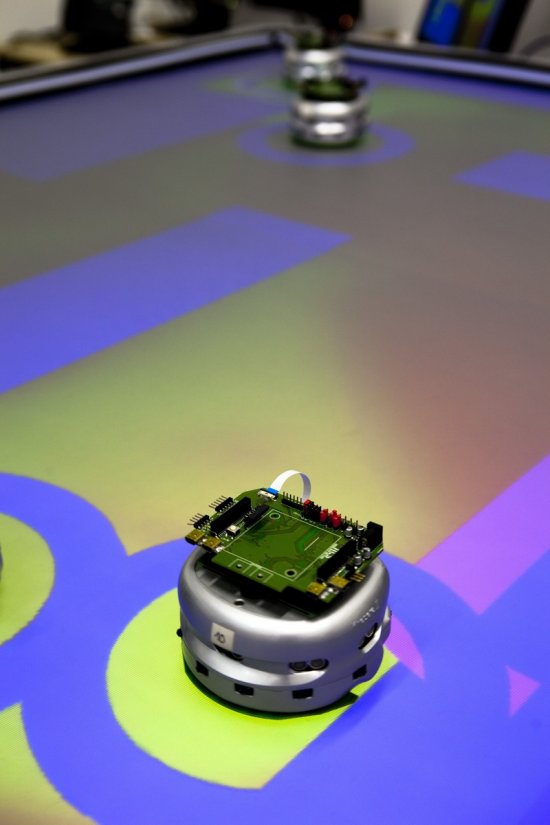
Hand of the hydraulically controlled robot Tino, programmed to learn like a child, by combining its vision and its movement.
© Frédérique Plas / ETIS / UCP / ENSEA / CNRS Photothèque
View the mediaScientific news
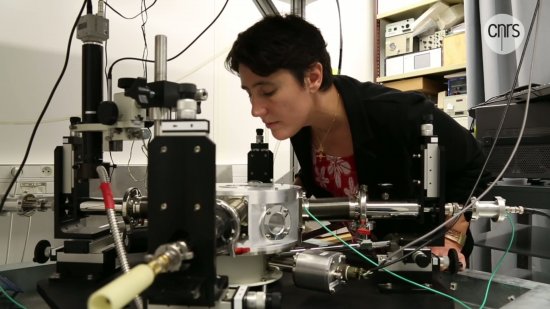
The conference "Artificial intelligence for industry and society: trust and frugality", scheduled to take place online on 25 February, is one of the events co-organised by the CNRS as part of the French Presidency of the European Union.
© Frédérique Plas / ETIS / UCP / ENSEA / CNRS Photothèque
View the mediaThis conference, co-organised by the CNRS, CEA and Inria, aims to promote French expertise in the field of artificial intelligence (AI) and to federate actions with European partners. Faced with the large-scale deployment of AI, the challenges are scientific, ethical and environmental. Society demands a responsible and trusted AI, from its conception to its multiple uses. At the same time, the awareness of the impact of digital technology in terms of energy and use of material resources requires a reflection on the development of more frugal approaches. Science is at the centre of these issues.
This conference is taking place in the context of France's presidency of the European Union, whose objective is to develop "a more united and sovereign Europe". The CNRS is involved at the European level and is mobilising during these six months by organising and taking part in a number of events that will showcase and reflect on this Europe of scientific research and innovation.
Discover in photos and videos the work in our laboratories.
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.