Production year
2003

© Leif CARLSSON/CNRS Images
20030001_0553
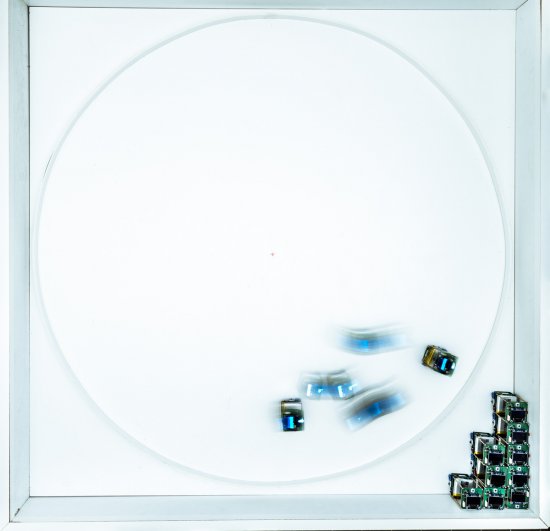
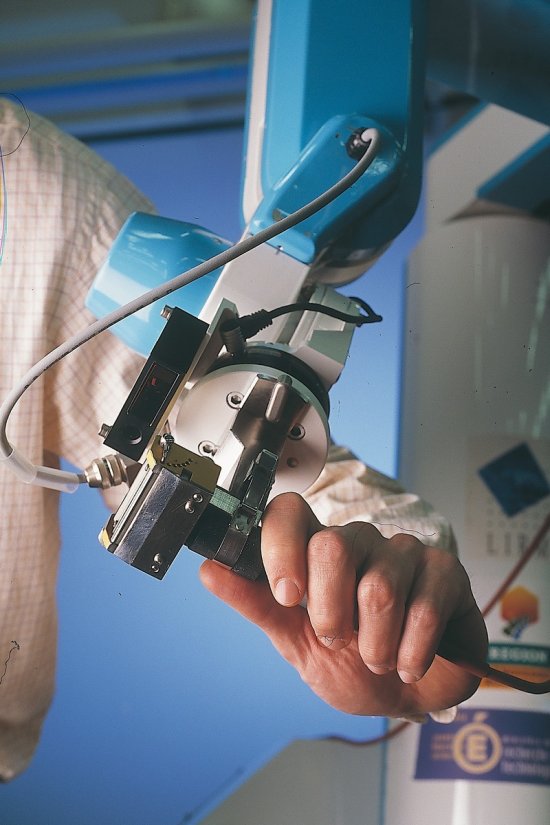
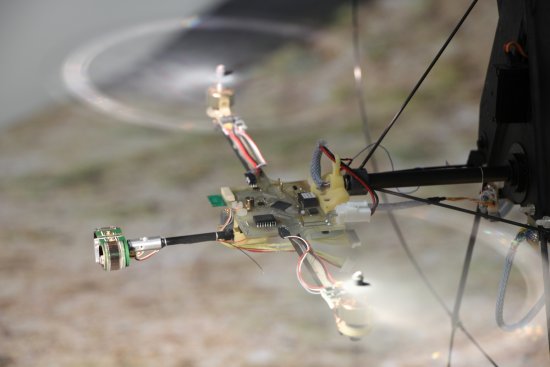
Robot I4R : Robot rapide dédié aux tâches de pick-and-place. Contrairement aux robots conventionnels, l'architecture parallèle de ce robot permet de réduire au minimum les masses en mouvement, ce qui permet d'atteindre des accélérations de 10 G (10 fois l'accélération d'un corps en chute libre). L'application typique de ce genre de robot est la manipulation rapide d'objets légers. Par exemple dans l'industrie agroalimentaire, il s'agit de saisir des objets sur un tapis roulant et de les déposer dans leur conditionnement à des cadences pouvant atteindre 3 objets à la seconde.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2003
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.