Institut P': Physique et Ingénierie en Matériaux, Mécanique et Énergétique (Institut P')
FUTUROSCOPE CEDEX
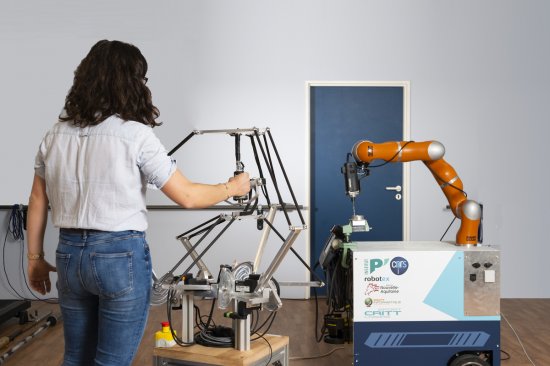
The P' Institute is a research laboratory in the fields of Physical Sciences and Engineering Sciences. Its activities cover a broad spectrum of complementary themes and skills ranging from the physics of materials to the mechanics of fluids and materials, to mechanical engineering and energy. The main fields of application are transport and energy, with particular attention to environmental aspects.