Institut Méditerranéen d'Océanologie (MIO)
MARSEILLE CEDEX 09
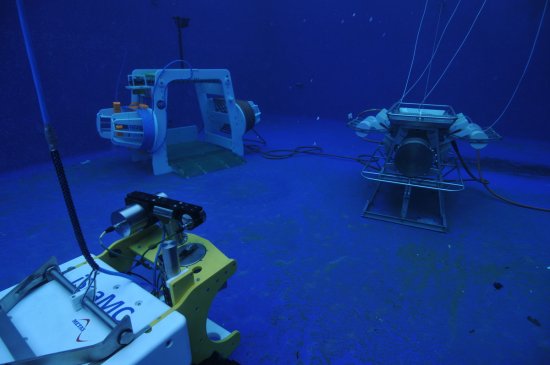
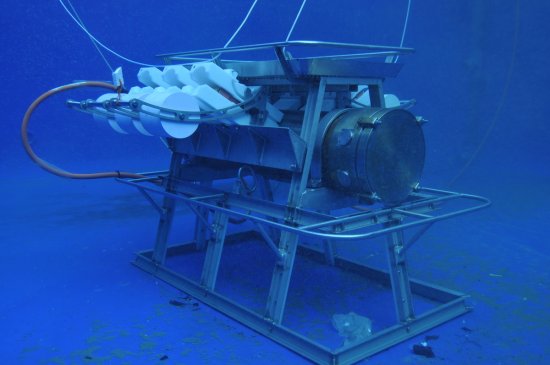
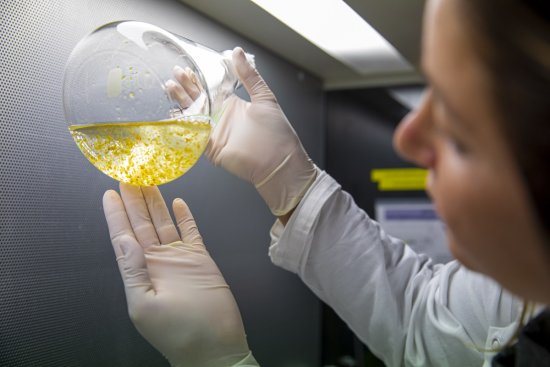
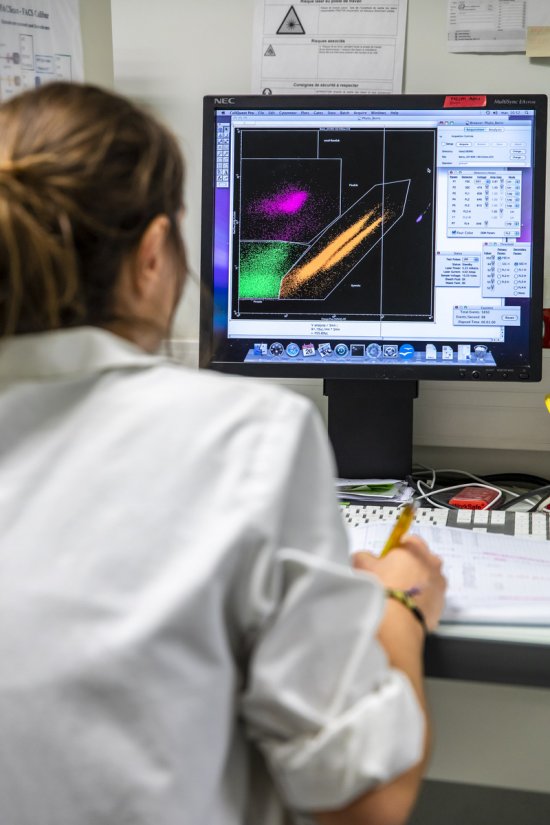
The MIO is a research laboratory in Oceanology. Its goal is to better understand the oceanic system and its evolution in response to global changes. The MIO constitutes a center of expertise in marine biology, ecology, biodiversity, microbiology, halieutics, physics, chemistry, biogeochemistry and sedimentology. Its working environment is the world ocean, alongside its continental, atmospheric and sediment interfaces.