© Guy CHASTAGNER/CNRS Images
Référence
19930001_0119
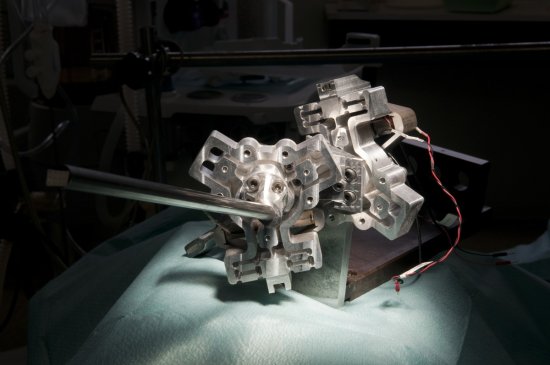
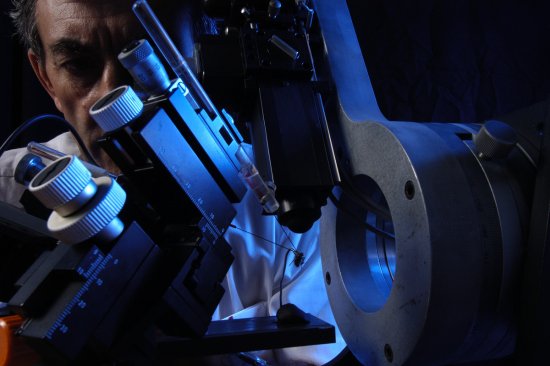
Stéréovision trinoculaire pour une application en robotique spatiale : mise en correspondance global
Stéréovision trinoculaire pour une application en robotique spatiale : mise en correspondance globale des images par un algorithme inspiré de ceux utilisés en reconnaissance vocale. Conception G. GUENOT.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales