© Faiz BEN AMAR/CNRS Images
Référence
20030001_0829
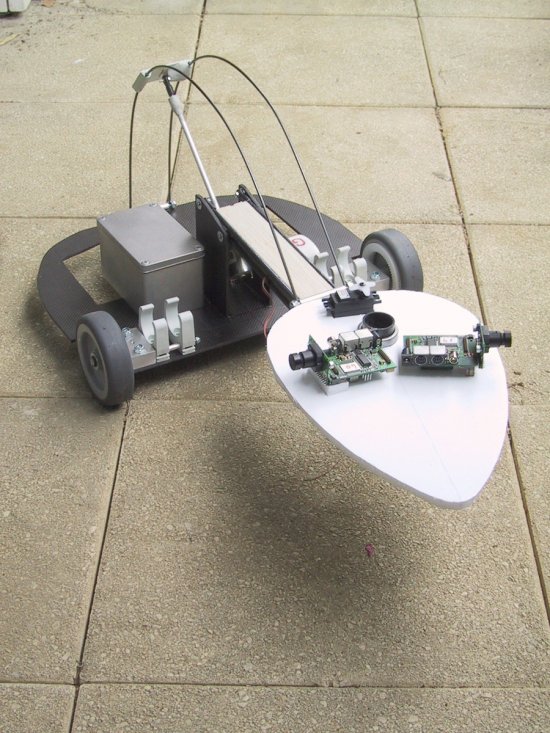
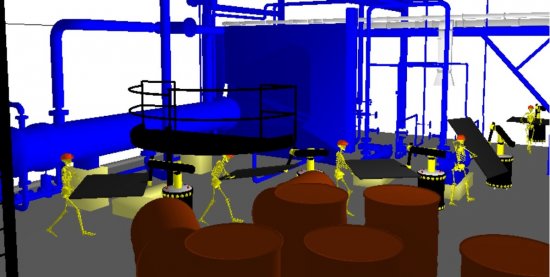
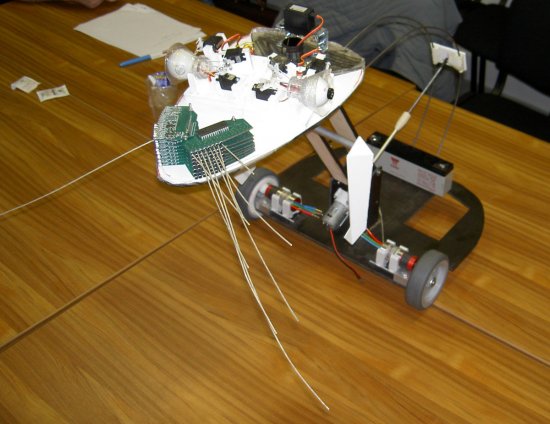
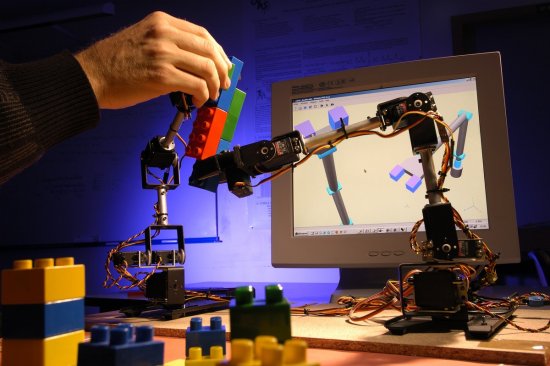
Système de simulation du comportement dynamique de robots mobiles, intégrant ses interactions avec l
Système de simulation du comportement dynamique de robots mobiles, intégrant ses interactions avec les sols naturels. Ce logiciel permet de réaliser une analyse du comportement des robots tout-terrain sur des sols de propriétés géométrico-physiques différentes.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales