Année de production
2015

© Antoine CULLY / UPMC / CNRS Images. Licence CC BY-SA
20150051_0011
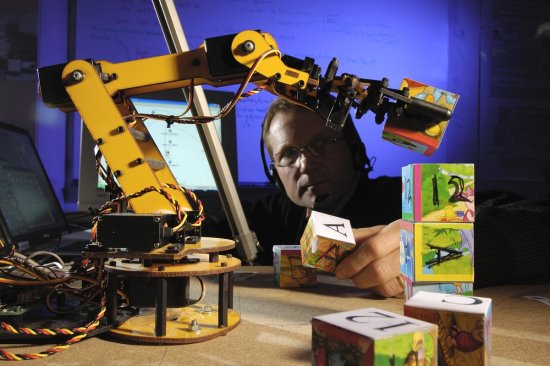
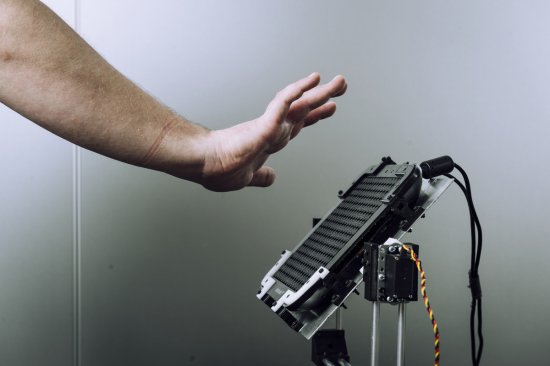
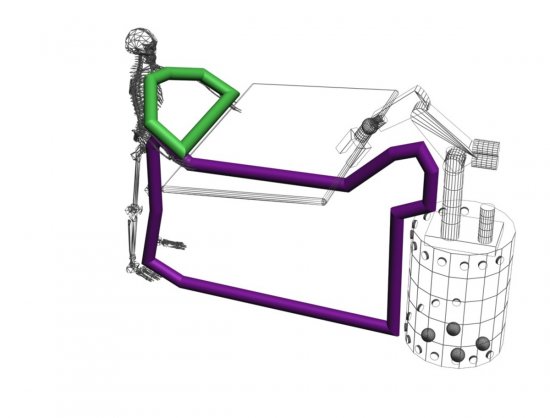
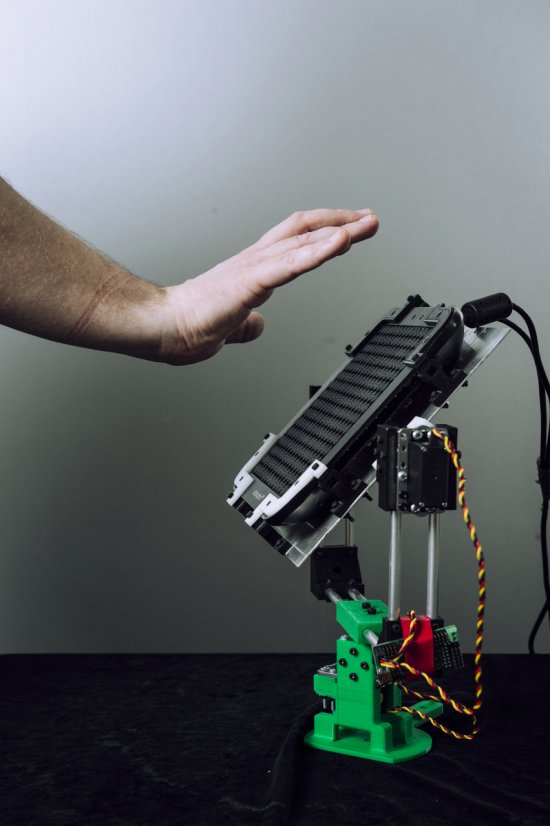
Robot capable de réapprendre automatiquement à marcher après avoir subi des dommages. Pour pouvoir continuer à marcher, il exécute un nouvel algorithme d’apprentissage baptisé « Intelligent Trial and Error » qui réalise des expériences afin d’adopter rapidement un comportement de compensation. Il se base sur une expérience préalablement menée pour créer une « carte » détaillée en six dimensions des milliers de manières différentes de réaliser sa tâche. Si le comportement testé ne fonctionne pas, le robot choisi un type de comportement différent dans une autre zone de la carte. Il est capable d’adopter une nouvelle démarche après seulement une minute de tests.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2015
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.