Production year
2022

© Cyril FRESILLON / ISM / CNRS Images
20220153_0014
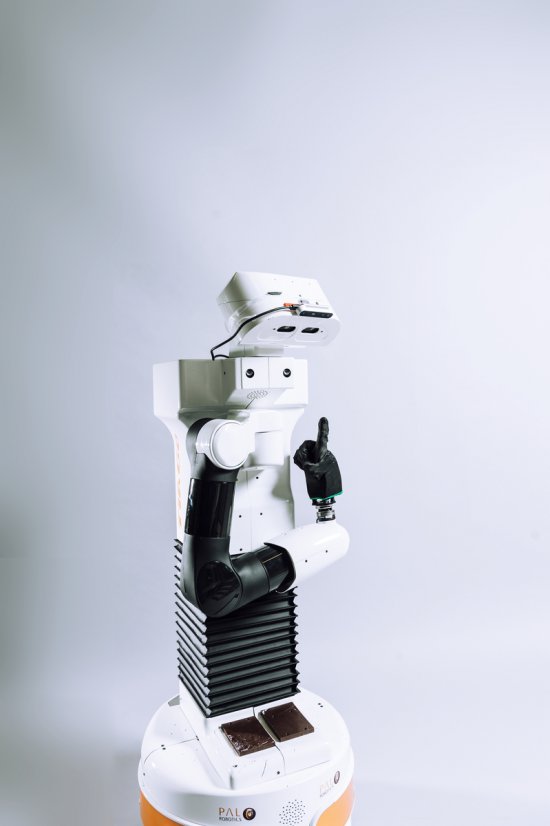
Prototype de patte robotique inspiré des pattes de fourmis. Les scientifiques essayent de reproduire le fonctionnement et la structure de ce mécanisme biologique pour l'intégrer à un robot hexapode. Ils étudient notamment comment augmenter son autonomie et son déplacement, grâce à la répartition des forces en s'inspirant de l'exosquelette de la fourmi, de l'angle d'inclinaison de ses pattes, et des organes sensoriels qui lui permettent d'améliorer ses performances énergétiques lors de la marche. Cela peut permettre à ce biorobot (contraction de biologie et de robot) de parcourir plus de chemin, sur des terrains plus complexes, là où les robots à roues ou les êtres humains ne pourraient pas avoir accès facilement.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2022
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.