Production year
2016

© Frédéric MALIGNE/MSH Toulouse/CNRS Images
20160058_0033
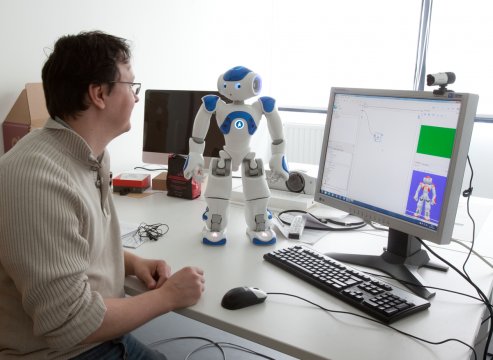
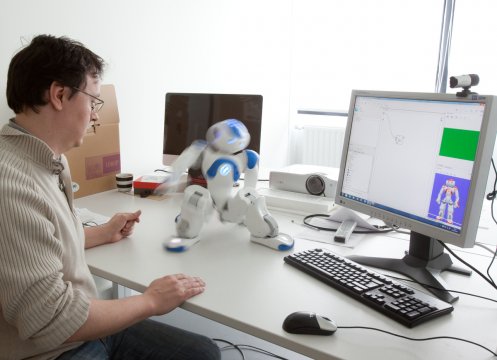
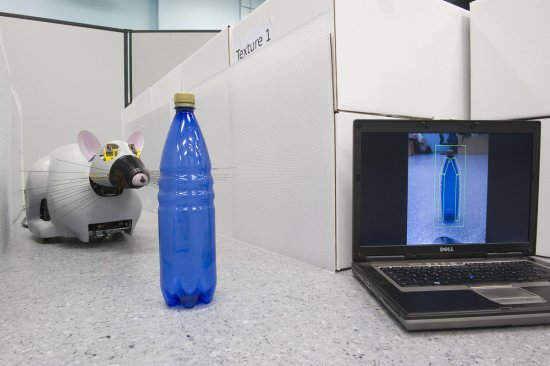
Interaction entre un ingénieur et le robot humanoïde NAO. Ce dernier possède différents capteurs (tactiles, visuels, auditifs) lui permettant d'interagir avec son environnement. En s'appuyant sur les acquis des chercheurs en matière d'études des interactions Homme-Machine et des interactions Homme-Homme, il s'agit de comprendre les spécificités de la relation Homme(s) - Robot humanoïde, afin de les faciliter. Le robot peut être conçu comme un simple assistant de l'opérateur humain (robot porte-outil), ou comme robot équipier ou encore robot-compagnon. Les compétences nécessaires à chaque niveau de collaboration sont différentes. La dimension sociale de l'interaction H-R est envisagée, dans plusieurs projets. Plateau ROB, de la plateforme technologique Cognition, comportements et usages (CCU).
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2016
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.