© Jérôme CHATIN/CNRS Images
Reference
20030001_1436
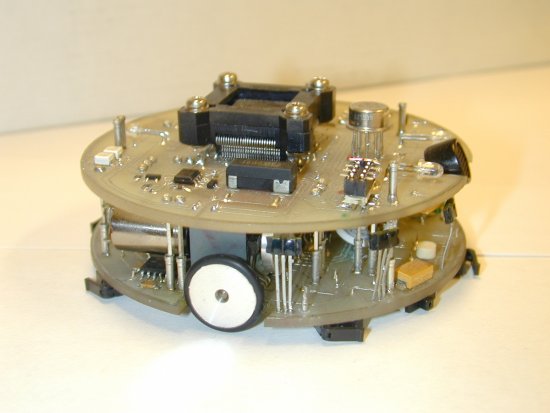
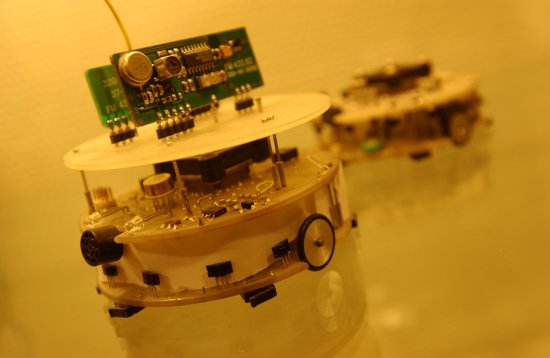
Développement d'une architecture de contrôle hiérarchique et réactive pour le transport coopératif d
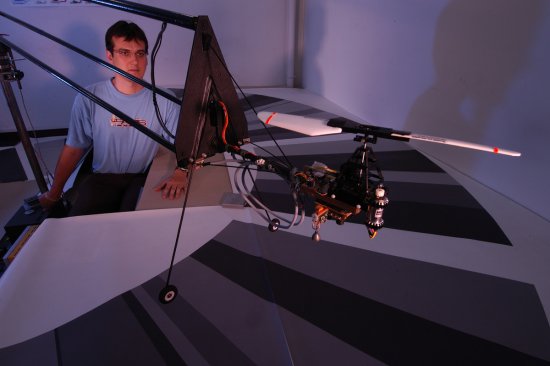
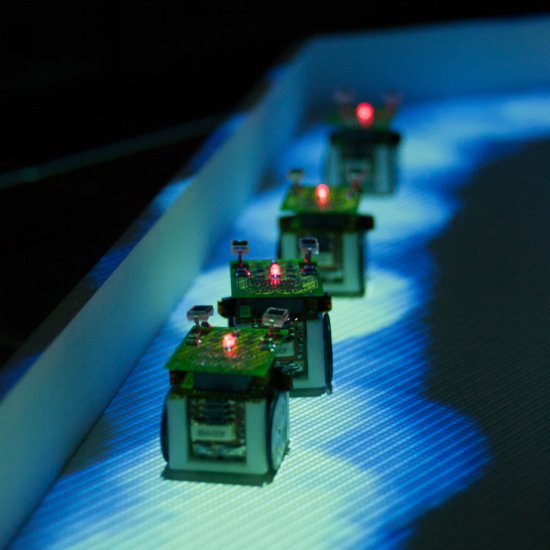
Développement d'une architecture de contrôle hiérarchique et réactive pour le transport coopératif d'objets. L'objectif est de faire réaliser des tâches complexes par un groupe de mini-robots, chacun exécutant uniquement des tâches élémentaires (évitement d'obstacles, attraction vers une source de lumière,...). La tâche complexe étudiée ici, concerne la poussée et le positionnement d'un objet lourd sur une cible placée dans l'environnement en utilisant la coopération de plusieurs mini-robots.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions