© Jérôme CHATIN/CNRS Images
Reference
20030001_1433
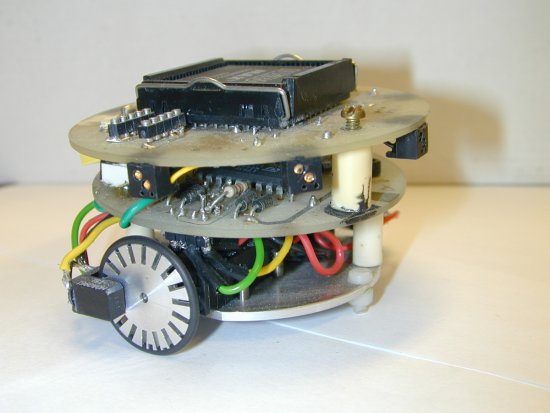
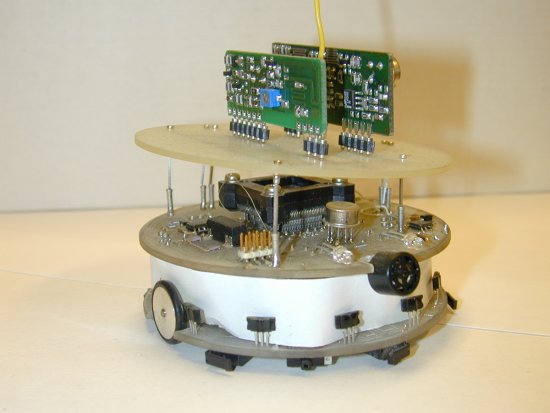
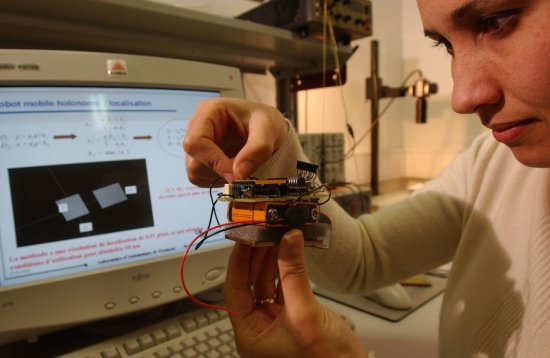
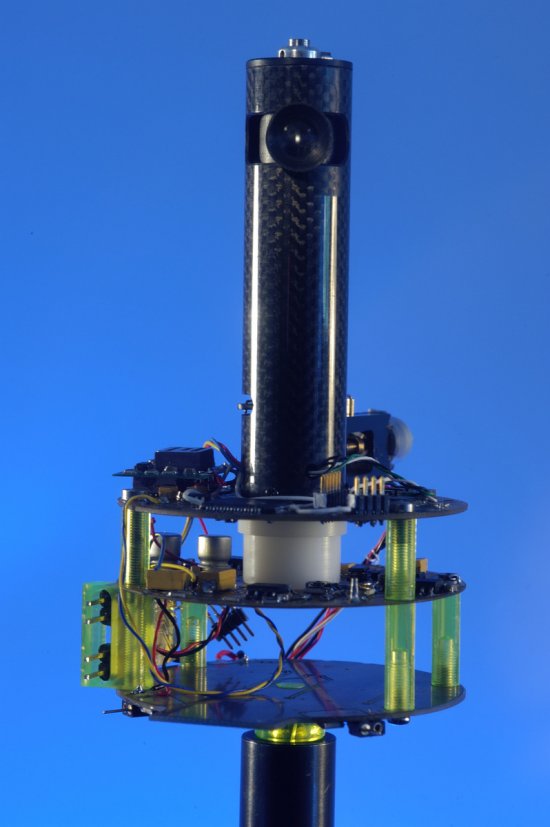
Développement de capteurs tactiles pour la communication antennaire entre des mini-robots et des bla
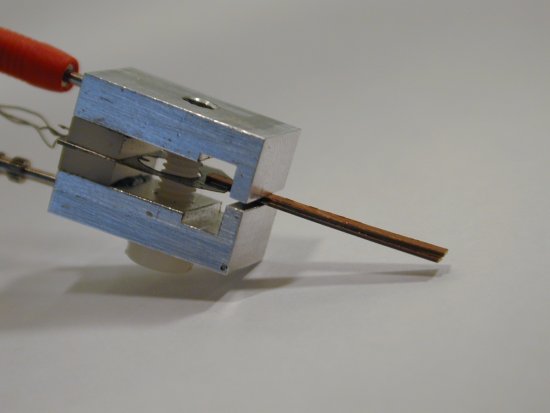
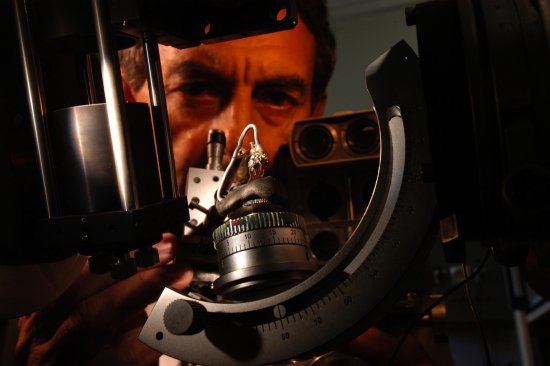
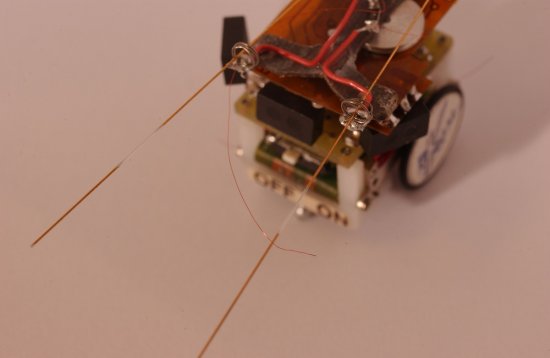
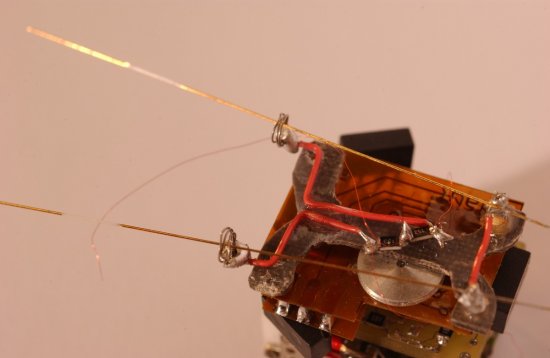
Développement de capteurs tactiles pour la communication antennaire entre des mini-robots et des blattes. Ces capteurs sont implantés sur des mini-robots ALICE développés à l'EPFL (Suisse). Etude des capteurs et de l'électronique embarquée. Développement d'une architecture de commande sur les microcontrôleurs du robot.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions