Production year
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0053
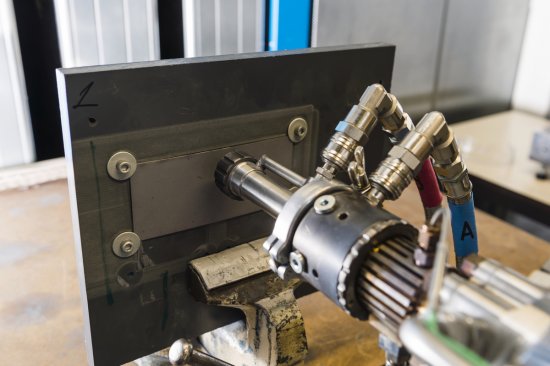
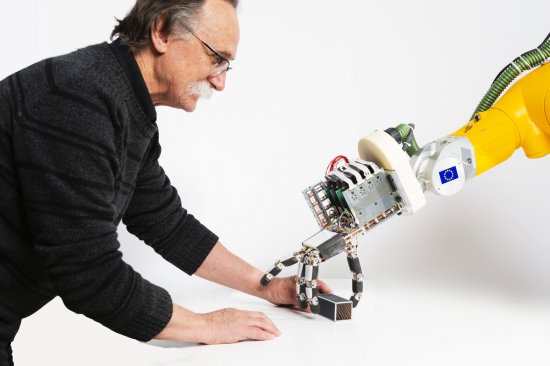
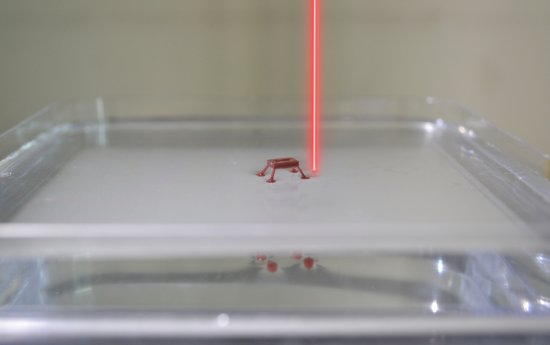
L'organe de coupe monté sur un des bras manipulateurs de R2T2 s'apprête à sectionner une tige de vigne factice, lors d'un test de ce robot. R2T2 est un robot agricole autonome capable de se déplacer dans un vignoble pour tailler de manière appropriée chaque pied de vigne. A cette fin, il perçoit la plante, dont il modélise et identifie les différents éléments en temps réel. Puis, sur la base de règles de taille, il établit les parties à sectionner. R2T2 doit aussi planifier le mouvement à exécuter, afin d’éviter de heurter la vigne ou les fils, et de respecter ses capacités dynamiques et la cinématique. Afin de développer des stratégies de définition et de contrôle du mouvement, le LAAS-CNRS a conçu et imprimé en 3D un pied de vigne modulaire (en marron sur la photo). Il est constitué de modules interchangeables pour permettre de multiples configurations, et muni de marqueurs infra-rouge (blancs). Leur localisation par un système de capture de mouvement permet, grâce au modèle du pied, de définir les consignes que doit atteindre l'organe de coupe en conditions idéales. L’utilisation d’un robot pour la taille de vigne vise notamment à réduire la pénibilité du travail sur les exploitations viticoles.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.