Production year
2002

© Richard LAMOUREUX/INRIA/CNRS Images
20020001_1351
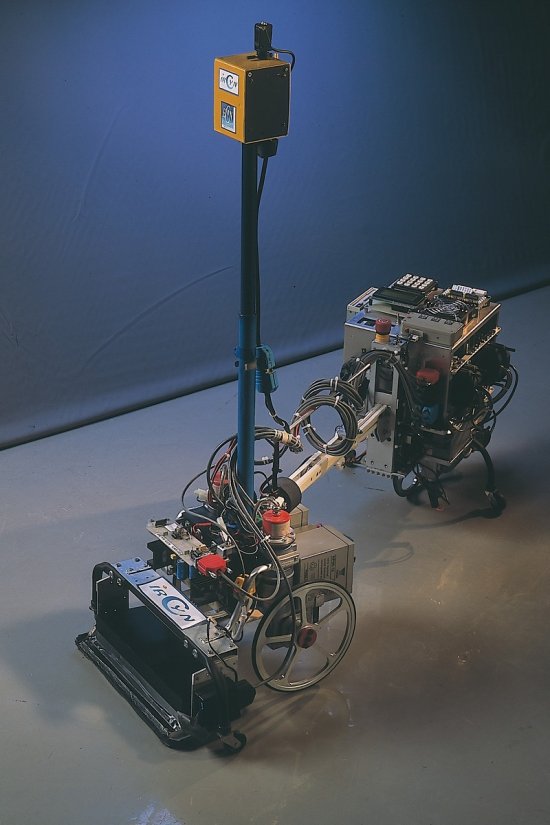
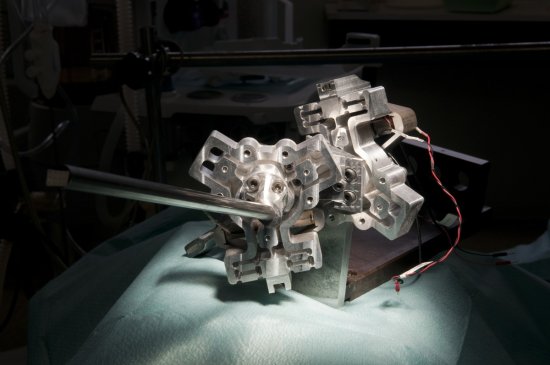
Simplet, robot mobile expérimental. Plateforme expérimentale pour la détection d'obstacle et la planification de trajectoire. Le robot Simplet est équipé de six roues dont deux motrices. Sa propulsion de type "char" lui permet d'avancer en ligne droite et de tourner sur place, mais aussi d'obtenir des mouvements plus complexes tels que des arcs de cercles. La partie capteur de vision est constituée d'une caméra CCD couleurs couplée à un transmetteur UHF. La réception vidéo s'effectue par l'intermédiaire d'un démodulateur satellite relié à une carte d'acquisition vidéo PCI.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2002
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.