Production year
2016

© Frédérique PLAS / ETIS / UCP / ENSEA / CNRS Images
20160097_0116
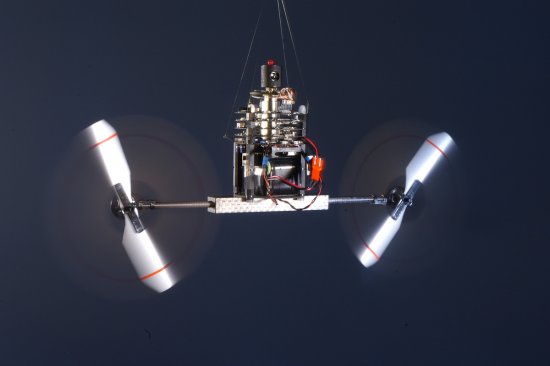
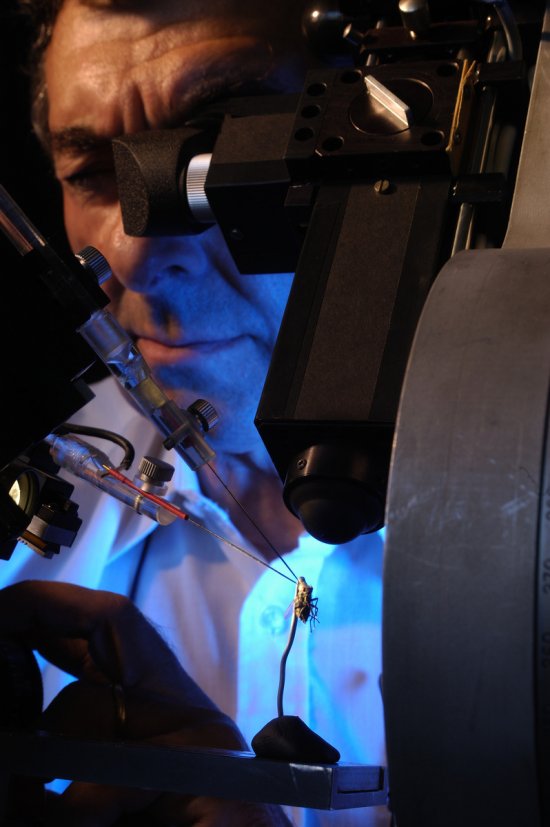
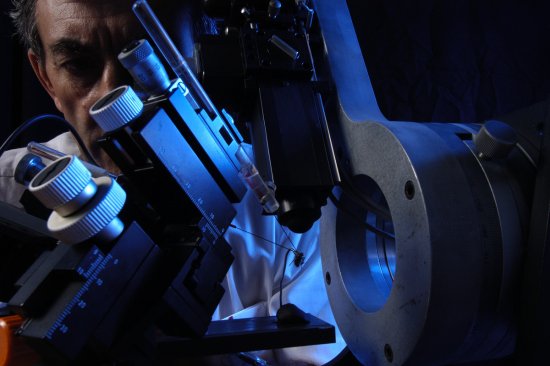
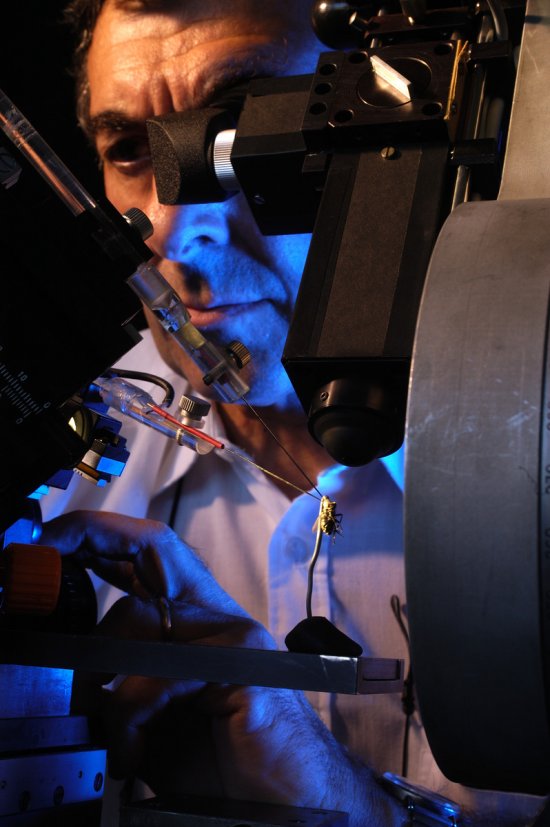
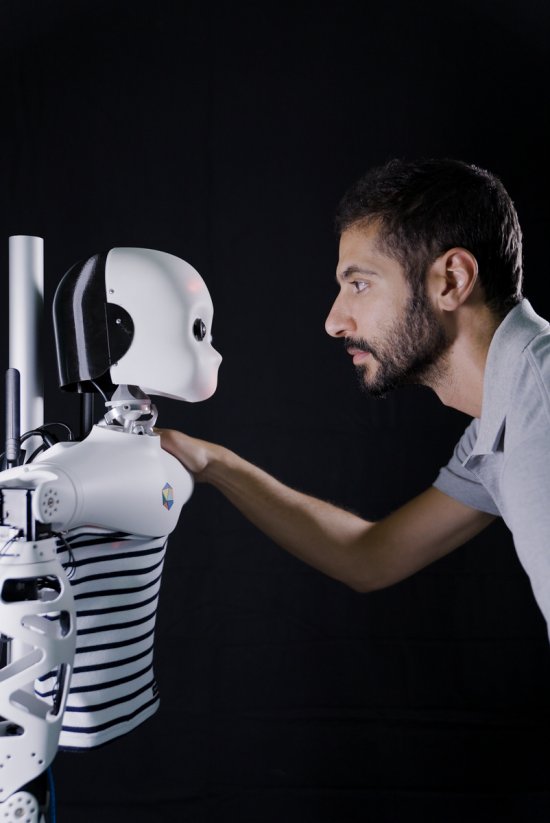
Robot souple et bio-inspiré basé sur la tenségrité pour modéliser la colonne vertébrale humaine ou la structure d'un serpent. Le contrôle de ce robot requiert la compréhension du contrôle neuronal au niveau de la moelle épinière pour la réalisation de synergies motrices par les générateurs rythmiques (central pattern generators). Ce projet est financé par la chaire d'excellence UCP-CNRS - Robotex.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2016
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.