Production year
2016

© Frédérique PLAS / ETIS / UCP / ENSEA / CNRS Images
20160097_0062
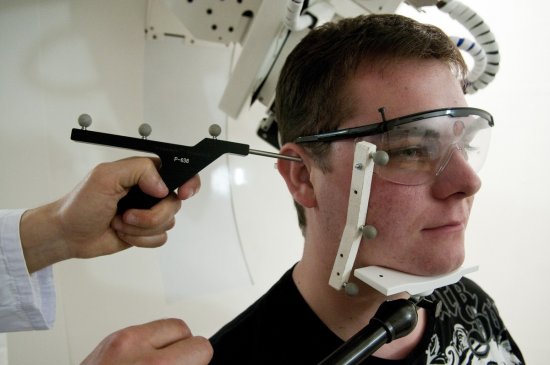
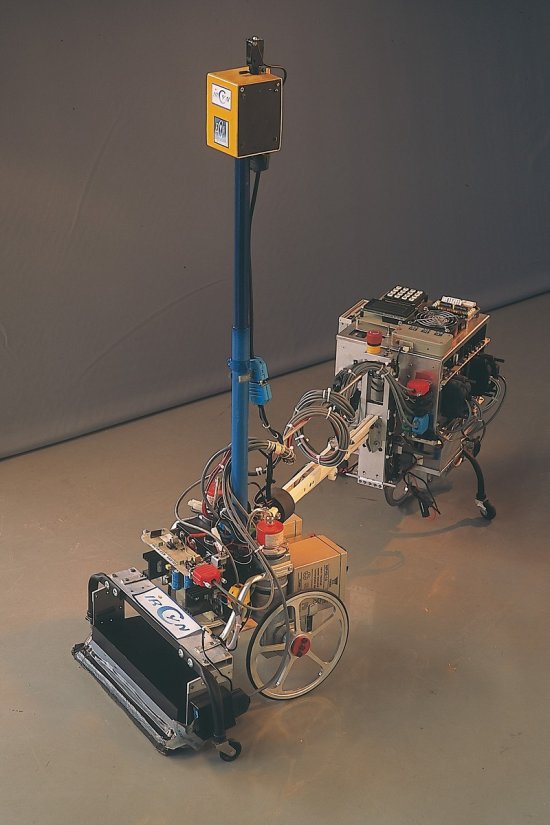
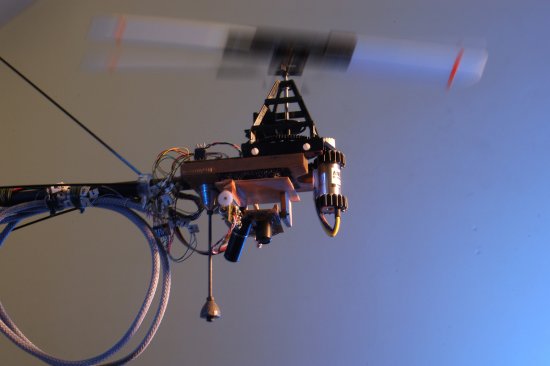
Manipulation et contrôle du robot à commande hydraulique Tino, utilisé pour l'étude des interactions physiques et sociales et la modélisation du contrôle sensori-moteur d'un robot humanoïde. Il possède 21 articulations et 9 possibilités d'expression, dont la joie et la tristesse. Il est programmé pour apprendre à la manière d'un enfant, en associant sa vision et son mouvement, son état interne avec ce qu'il voit. Ce projet robotique est financé par Robotex, ANR Interact et Dirac, SESAME Île de France.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2016
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.