Grenoble Images Parole Signal Automatique (GIPSA-lab)
ST MARTIN D HERES CEDEX
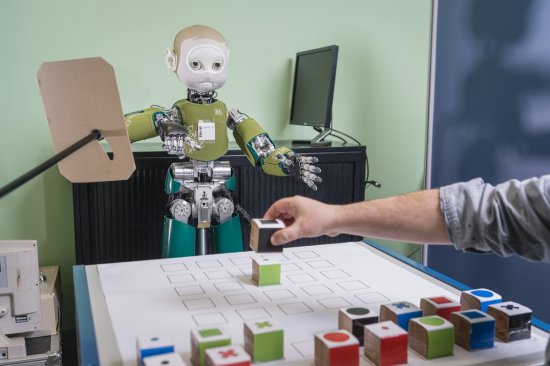
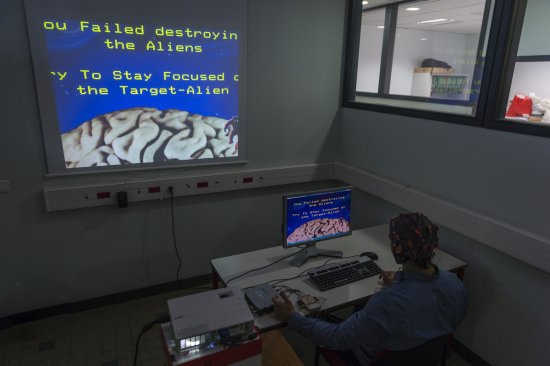
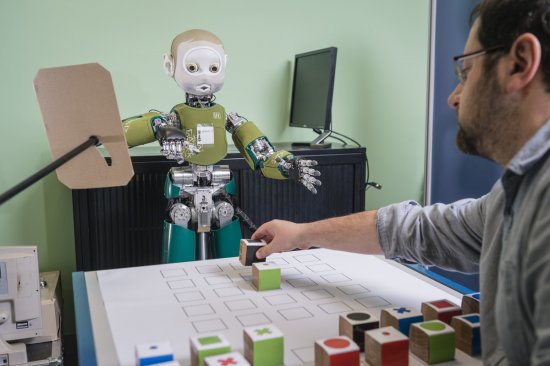
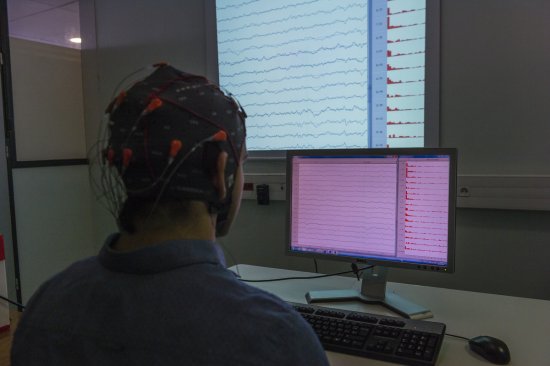
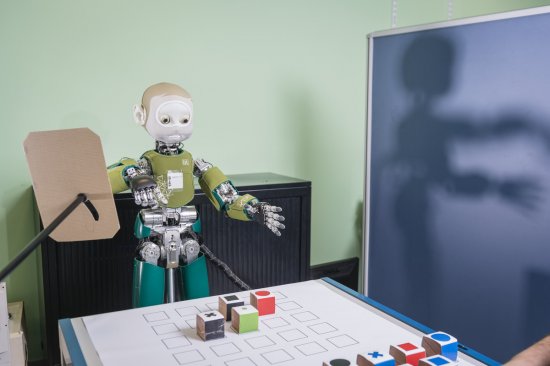
GIPSA-lab develops theoretical and applied researches on control, signal and images processing, speech, cognition, robotics and artifical intelligence. Multidisciplinary and at the interface between the human, physical and digital worlds, its work is based on mathematical and computational theories for the development of models and algorithms, validated by hardware and software implementations.