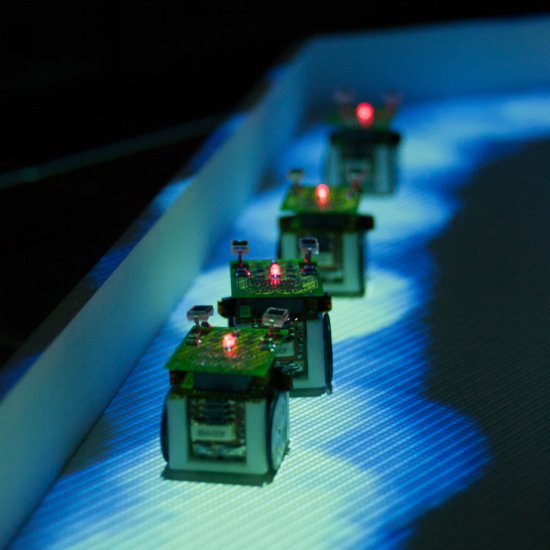
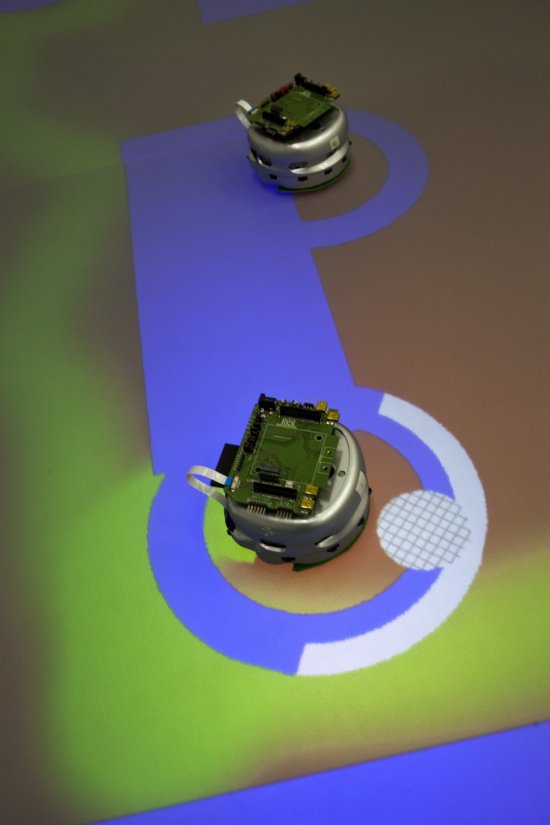
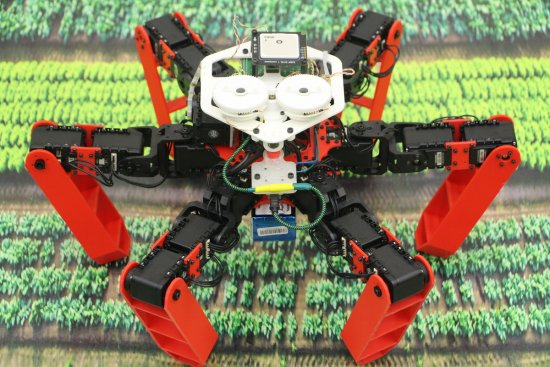
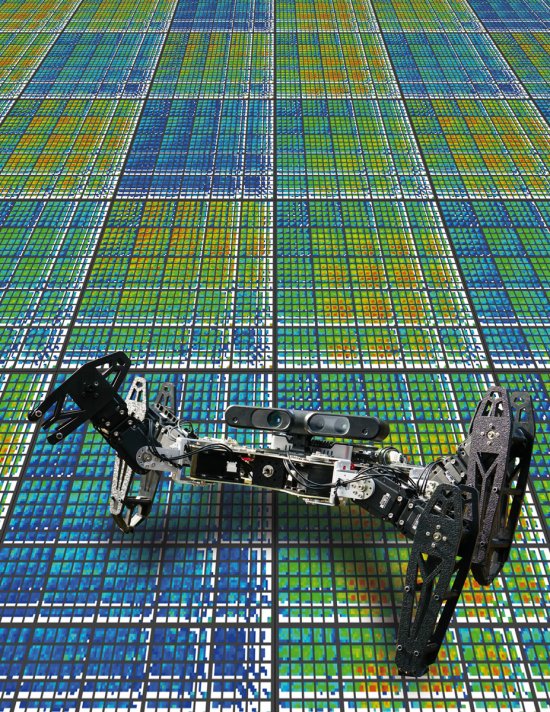
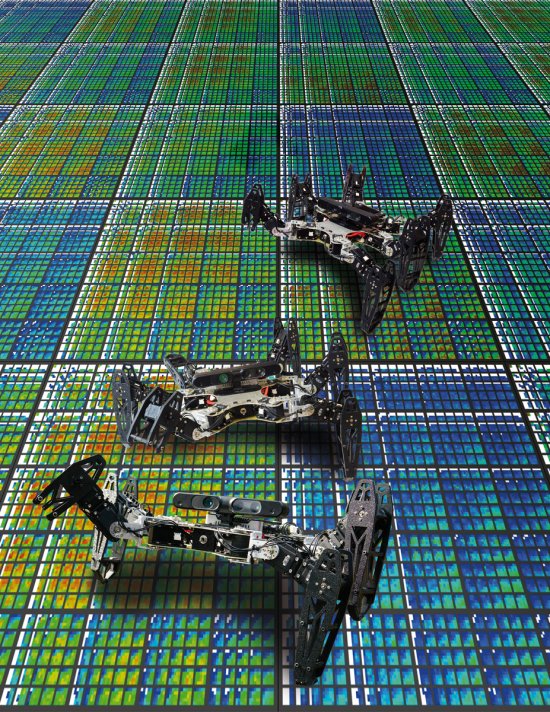
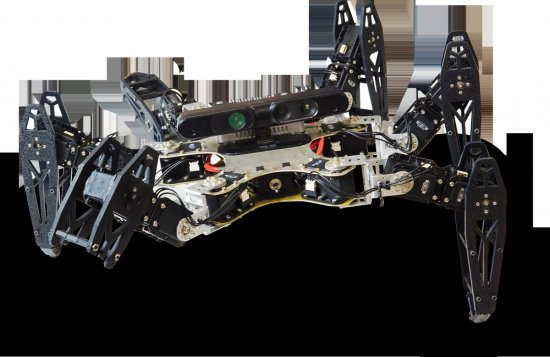
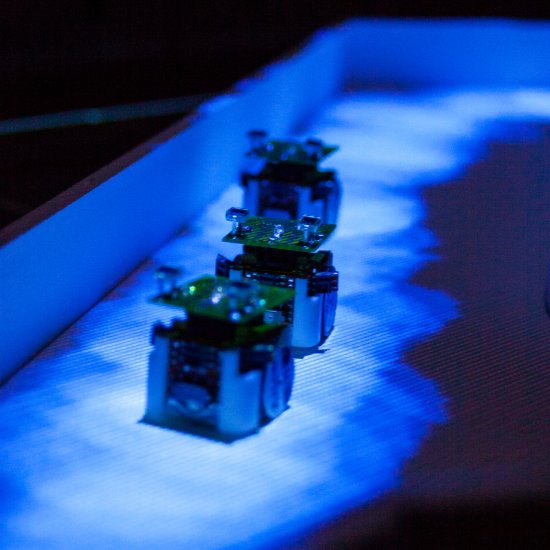
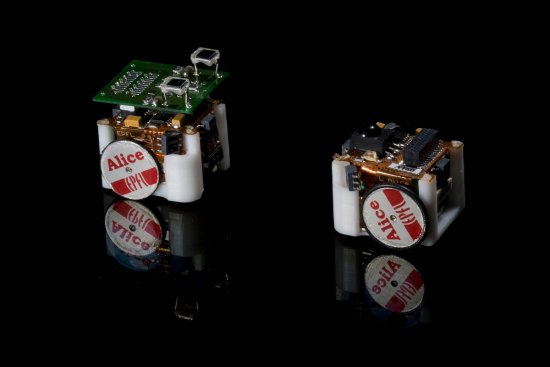
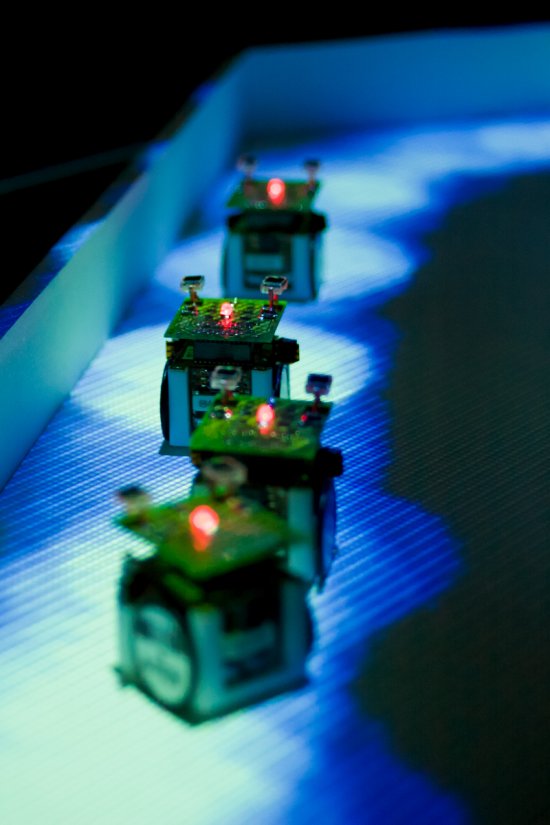
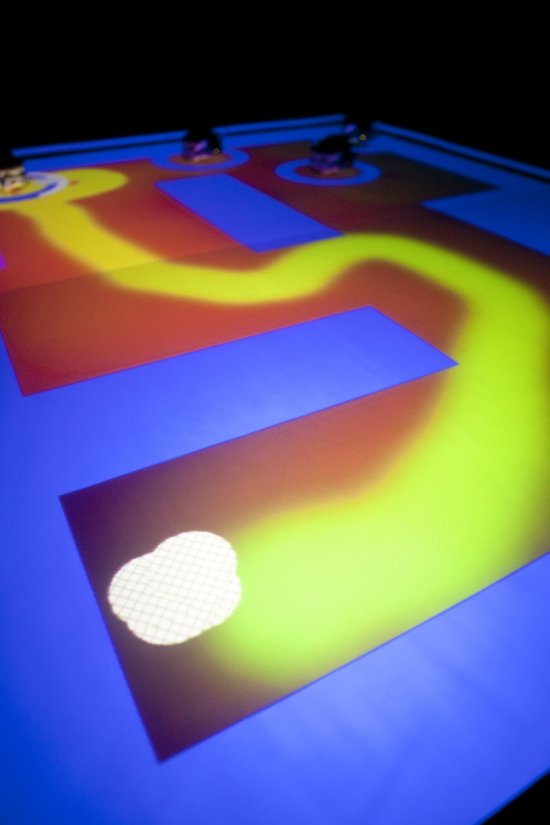
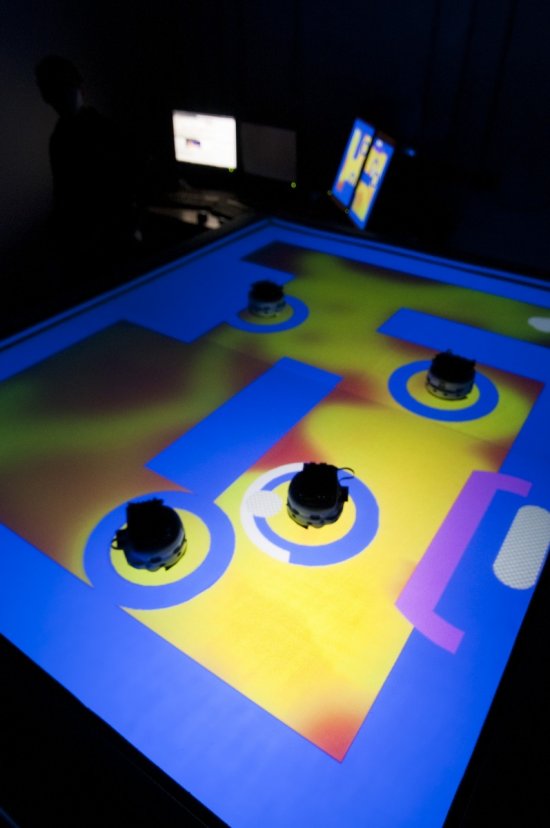
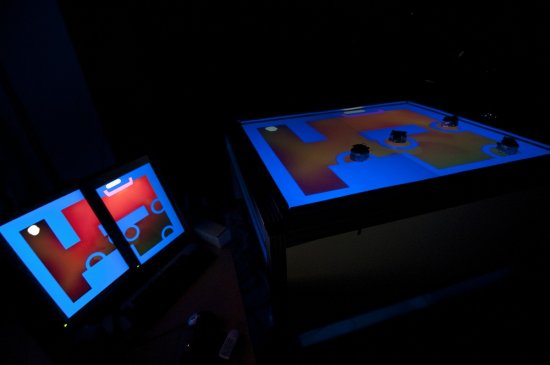
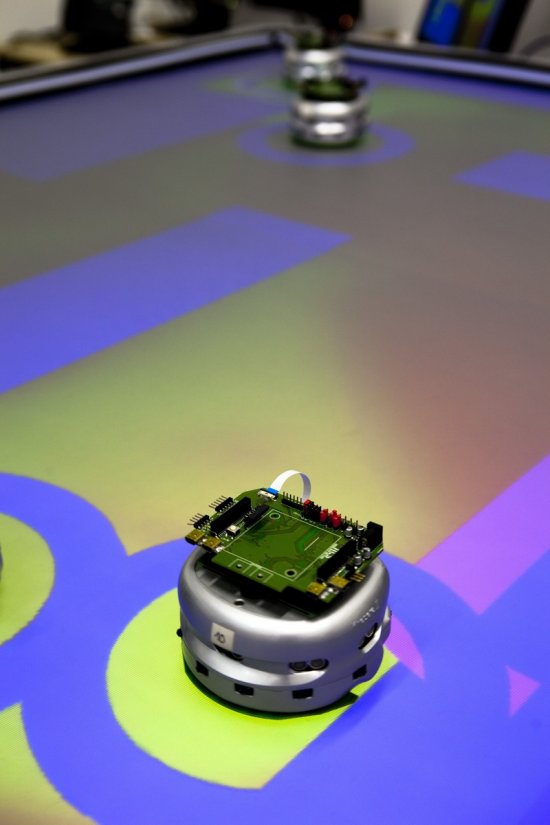
Microrobots whose algorithm was inspired by the social behaviour of certain animals or insects
© David VILLA / ScienceImage, CBI / CRCA / CNRS Images
View the mediaFolder
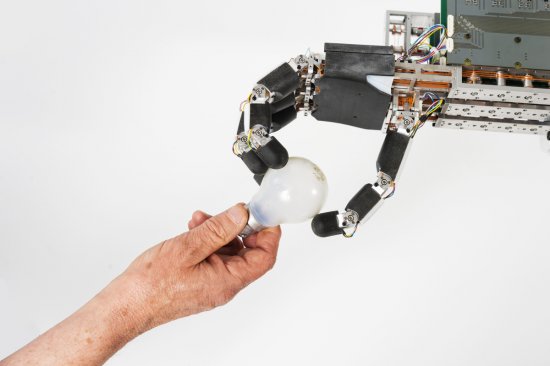
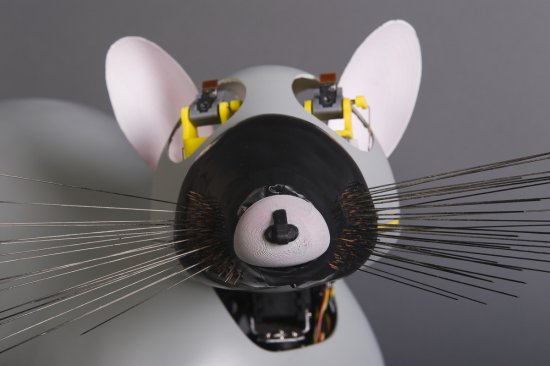
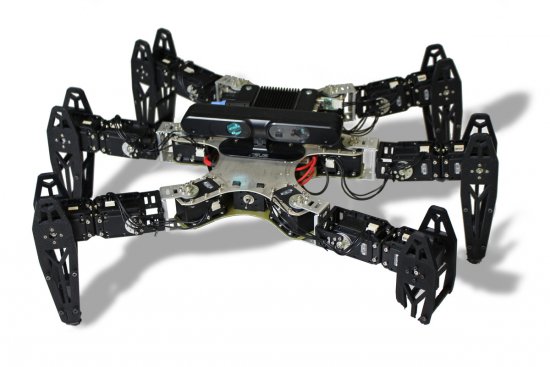
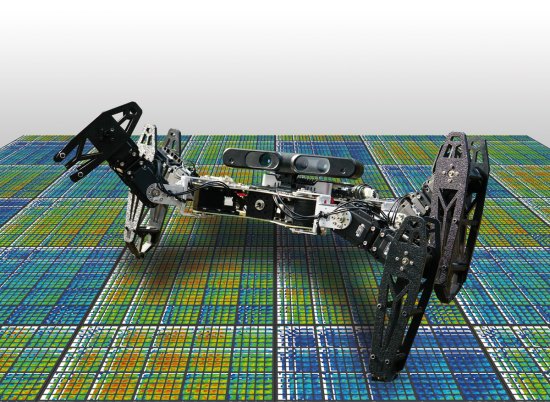
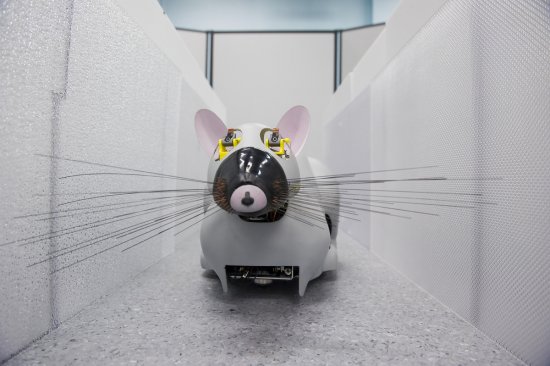
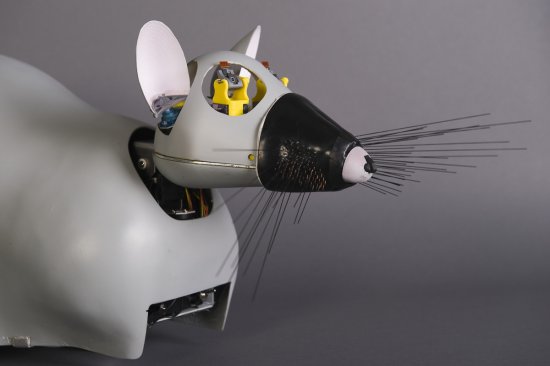
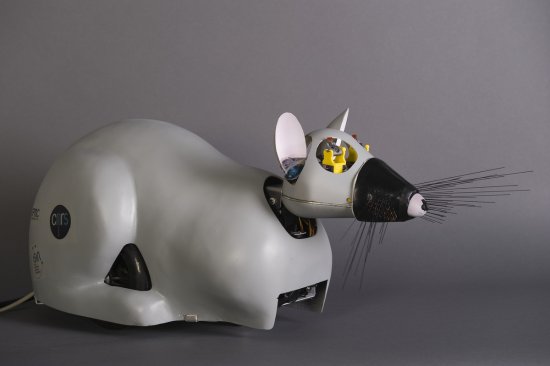
If you want to design the best robot, better look to the natural world!
© David VILLA / ScienceImage, CBI / CRCA / CNRS Images
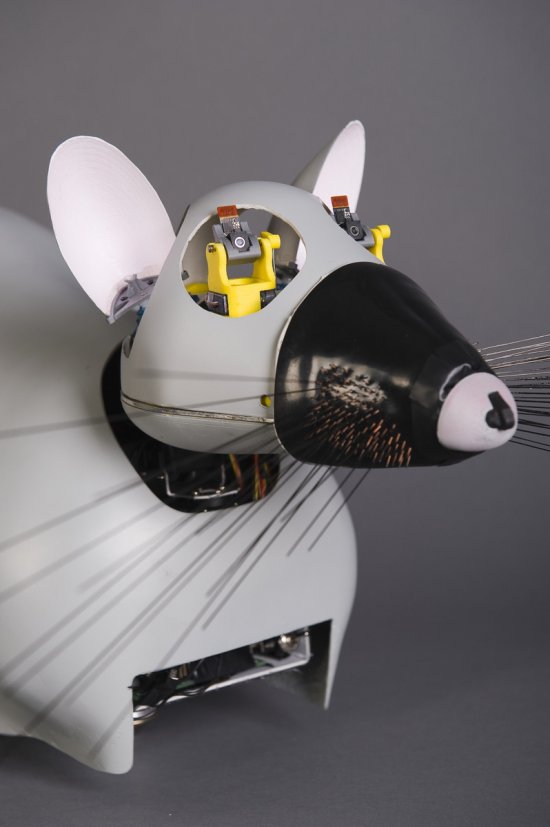
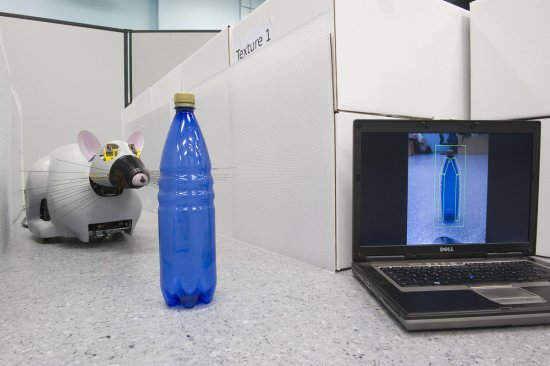
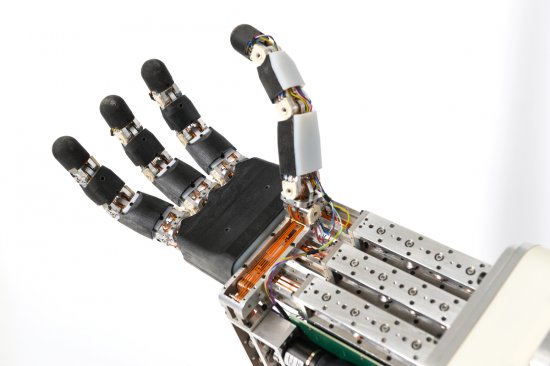
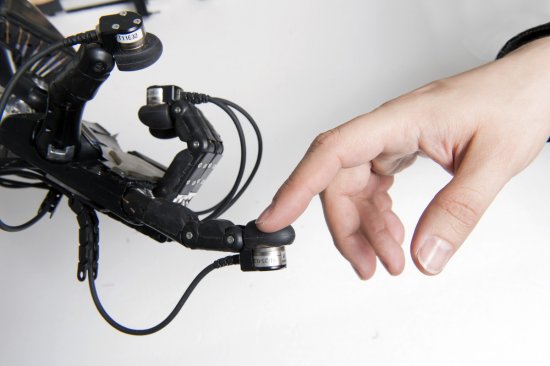
View the mediaLiving organisms have evolved over billions of years to overcome immense challenges related to locomotion, perception and interaction with the world in which they live. So it’s only natural that today’s robotic designers should draw inspiration from Mother Nature to improve their machines. In this special feature, we find out about bio-inspired and bio-mimetic robots that move like ants or rats, fly like insects, or move around in groups like a shoal of fish.
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.