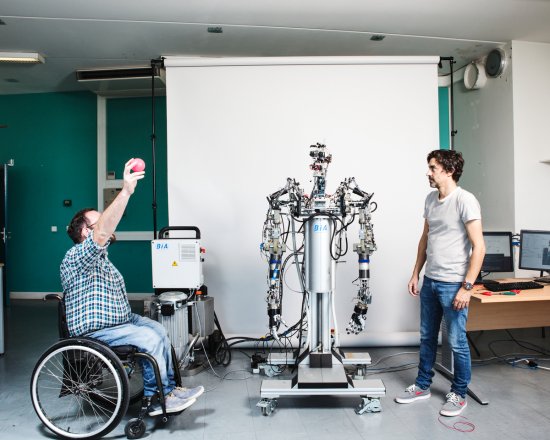
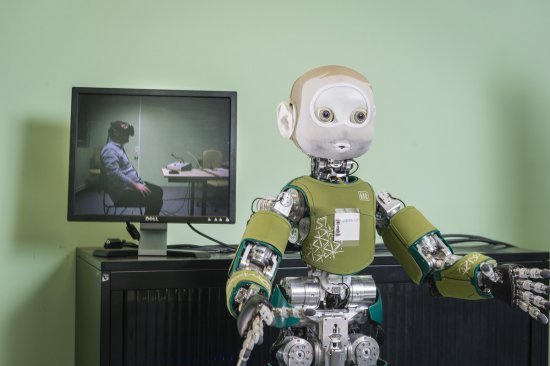
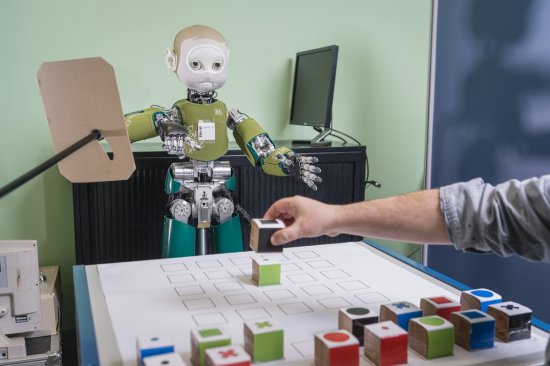
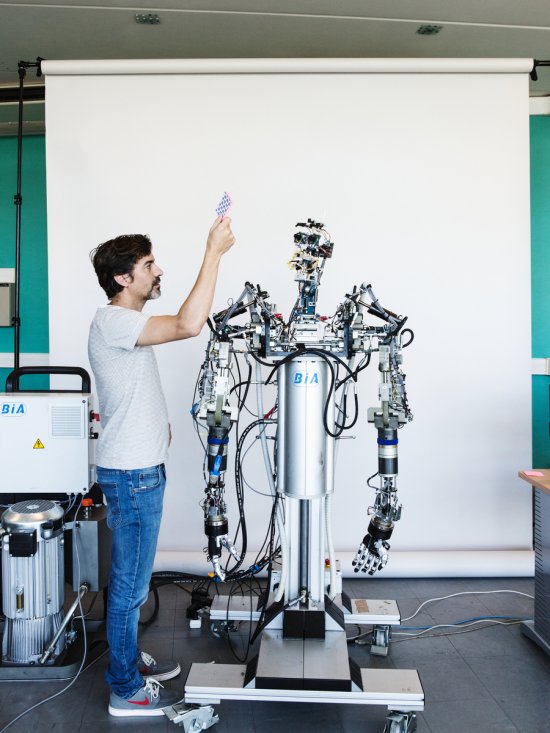
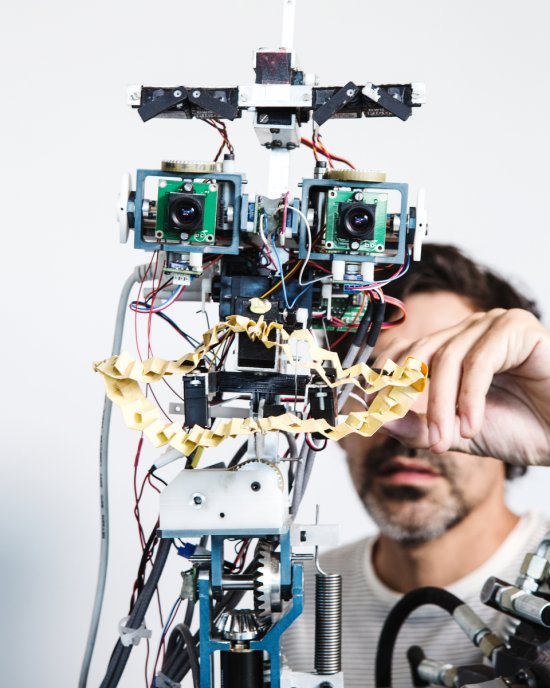
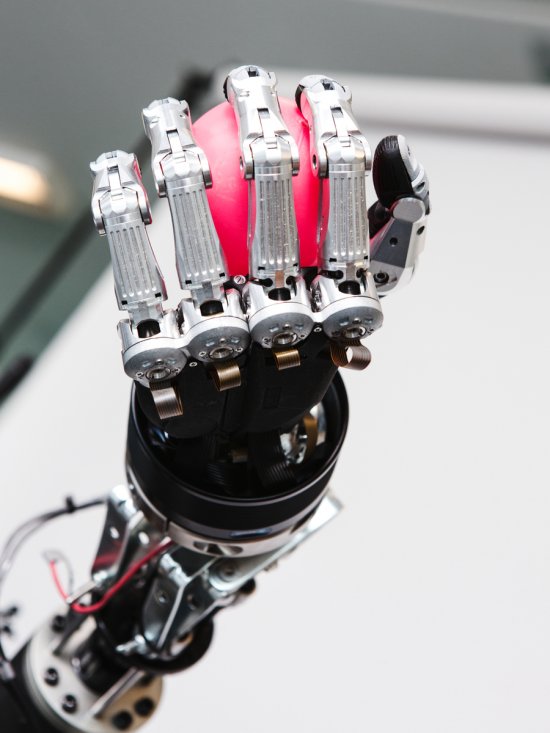
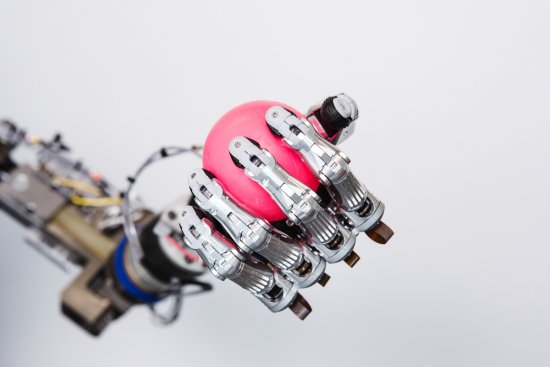
Main du robot à commande hydraulique Tino, programmé pour apprendre comme un enfant, en associant sa vision et son mouvement.
© Frédérique Plas / ETIS / UCP / ENSEA / CNRS Photothèque
Voir le médiaActualité scientifique
Le colloque « L’intelligence artificielle pour l’industrie et la société : confiance et frugalité » est l’un des événements coorganisés par le CNRS dans le cadre de la présidence française de l’Union européenne.
© Frédérique Plas / ETIS / UCP / ENSEA / CNRS Photothèque
Voir le médiaCe colloque, coorganisé par le CNRS, le CEA et l’Inria, a pour objectif de valoriser la compétence française dans le domaine de l’intelligence artificielle (IA) et de fédérer les actions avec des partenaires européens. Face au déploiement à grande échelle de l’IA, les enjeux sont scientifiques, éthiques et environnementaux. La société exige une IA responsable et de confiance, de sa conception à ses multiples usages. L’impact du numérique en termes de consommation d’énergie et d’usage de ressources naturelles impose une réflexion sur l’élaboration d’approches plus frugales. La science est au centre de ces enjeux.
Ce colloque a lieu dans le cadre de la présidence de la France de l’Union européenne dont l’objectif est de développer « une Europe plus solidaire et plus souveraine ». Très impliqué au niveau européen, le CNRS se mobilise durant ces six mois en organisant et en participant à de multiples événements qui donneront à voir et à penser cette Europe de la recherche scientifique et de l’innovation.
Découvrez en photos et en vidéos les travaux dans nos laboratoires.
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.